
The field of general-purpose robotics is rapidly evolving as companies invest in humanoid robots that can independently navigate work environments and perform tasks traditionally handled by humans. While these early applications may seem routine, such as moving objects in factories and warehouses, Toyota has claimed a significant breakthrough in expanding the capabilities of robots.
In collaboration with Columbia Engineering and MIT, Toyota has pioneered a learning approach known as “Diffusion Policy.” This innovative method empowers robots to swiftly acquire new skills by taking cues from human instructions or demonstrations, introducing the concept of Large Behavior Models.
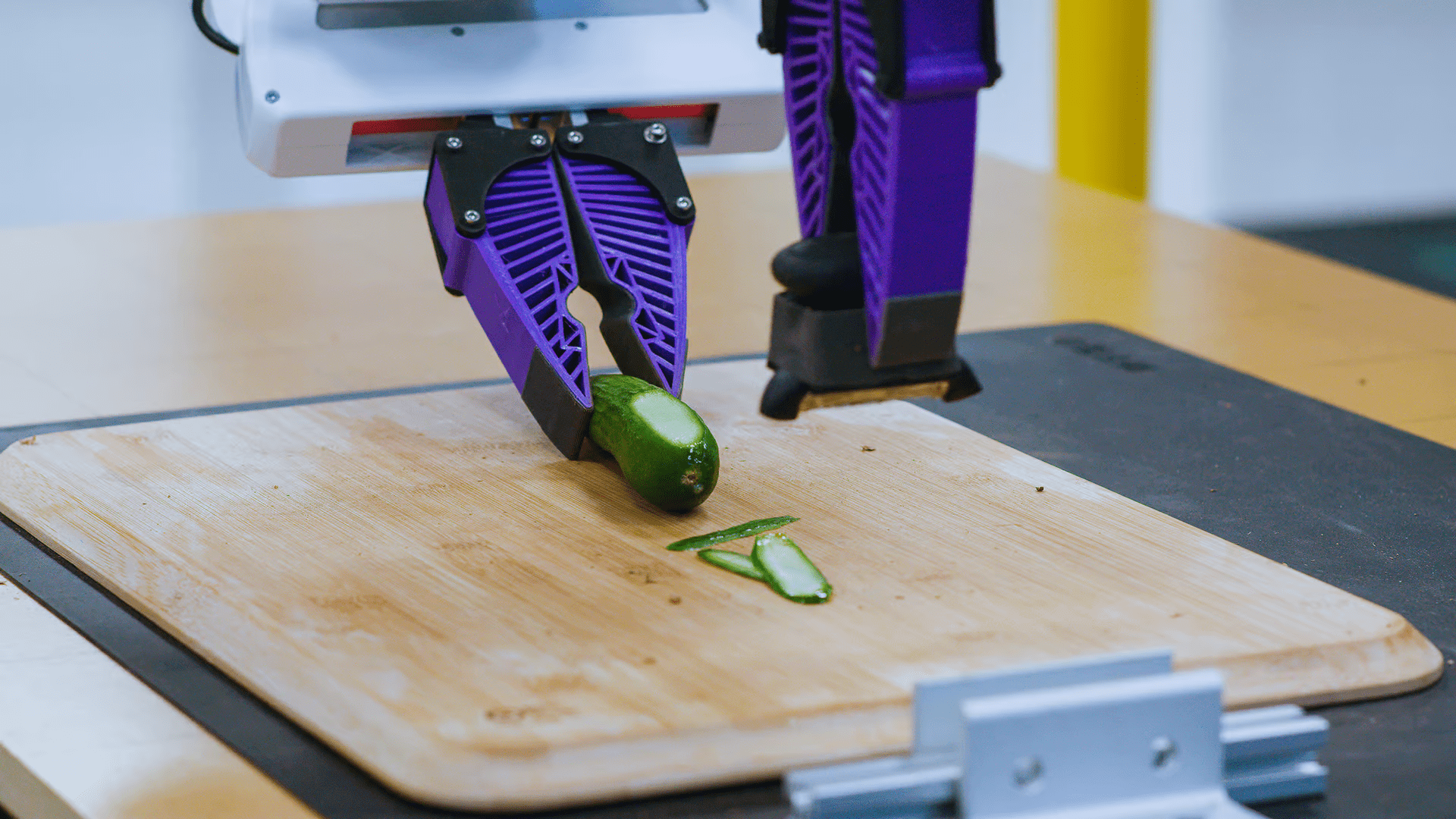
In contrast to startups that teach robots using virtual reality telepresence, where a human operator controls the robot through a VR headset, Toyota’s approach centers on haptics. Operators receive haptic feedback from the robot’s soft grippers, providing them with a tactile sense of the robot’s interactions with objects.
Instructing these robots involves a human operator repeatedly demonstrating a task under various conditions. The robot’s AI then constructs an internal model that accounts for both successful and unsuccessful attempts. Based on this model, the robot conducts physics-based simulations to refine its techniques. This learning process can take several hours, with the robot emerging the next day with the capability to execute the newly acquired behavior.
Toyota’s approach has already yielded successful results, with robots trained in over 60 small tasks, primarily in kitchen settings. These tasks require the robots to master the manipulation of different objects using a variety of tools and utensils.

Although the initial applications of robotic AIs may appear modest, Toyota’s breakthrough in learning capabilities paves the way for a future where robots can adapt to a wide range of tasks in diverse work environments.
This advancement signifies a significant step towards enhancing the versatility and usefulness of humanoid robots.
Source: Toyota

{kind=link}