
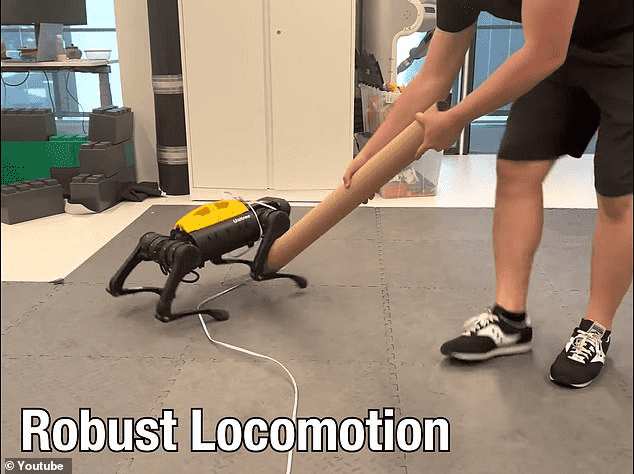
Researchers have released a video in which the 4-legged robot is at first seen flailing its legs in the air and struggling and 10 minutes after that, it can take steps. It rolls off of its back and even navigates being knocked over with a stick by one of the researchers.
Danijar Hafner, an artificial intelligence researcher at the University of California, Berkeley, worked with his colleagues to train the robot using reinforcement learning.
‘Typically, robots learn through a large amount of trial and error inside of computer simulations that are much faster than real time,’ Hafner explains to DailyMail.com via email.
‘After solving a task like standing up and walking in simulation, the learned behavior is then run on a physical robot.
‘But simulations fail to capture the complexity of the real world, so a behavior that works well in simulation might fail to solve the task in the real world.’
‘The Dreamer algorithm has recently shown great promise for learning from small amounts of interaction by planning within a learned world model,’ the researchers state in their paper, which has not yet been peer-viewed.
‘Learning a world model to predict the outcomes of potential actions enables planning in imagination, reducing the amount of trial and error needed in the real environment.’
‘A roboticist will need to do this for each and every task [or] problem they want the robot to solve,’ Lerrel Pinto, an assistant professor of computer science at New York University, who specializes in robotics and machine learning, explains to MIT Technology Review.
The research team cites other hinderances to this type of technology:
‘While Dreamer shows promising results, learning on hardware over many hours creates wear on robots that may require human intervention or repair,’ they state in the study abstract.
‘Additionally, more work is required to explore the limits of Dreamer and our baselines by training for a longer time.
‘Finally, we see tackling more challenging tasks, potentially by combining the benefits of fast real world learning with those of simulators, as an impactful future research direction.’
In a separate study, researchers at Germany’s Max Planck Institute for Intelligent Systems (MPI-IS) revealed in new research that their robotic dog, dubbed Morti, can learn to walk easily by using a complex algorithm that includes sensors in its feet.
‘If an animal stumbles, is that a mistake? Not if it happens once. But if it stumbles frequently, it gives us a measure of how well the robot walks.’

{kind=link}