
Meet this state-of-the-art “amphibious turtle robot” that can easily swap its limbs into flippers according to the prevailing surroundings. This sophisticated robot has been developed by researchers at Yale University and has been named “ART” (Amphibious Robotic Turtle)”. It has a lot of practical applications in the field of research and science, including the exploration of oceans, diver support, and its contribution to the monitoring of coastal ecosystems. This turtle-inspired robot has been built under the supervision of Kramer-Bottiglio’s lab and can surpass expectations in the field of mechanics as well. The research, however, was published in the journal Nature.
Coupled with this, researchers came up with this concept by being influenced with the land and aquatic turtles, as revealed by the press release on Wednesday. In addition to this, Rebecca Kramer-Bottiglio, who is the John J. Lee Associate Professor of Mechanical Engineering & Materials Science and principal investigator of the study, projected the findings in the following words, “Terrestrial and aquatic turtles share similar bodies, with four limbs and a shell, but have distinctive limb shapes and gaits adapted for their specific environment. Sea turtles have elongated flippers for swimming, whereas land turtles and tortoises have rounded legs for load bearing while walking.”
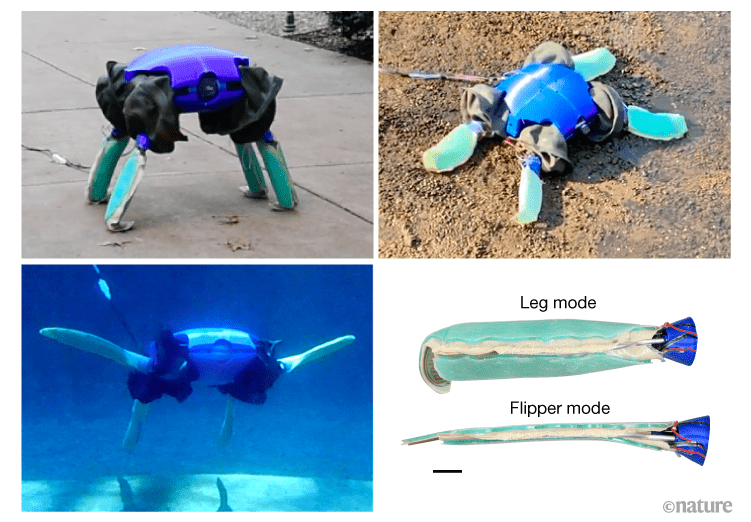
Not to mention, the robot has an eye-popping capability to instantly transform its limbs into flippers while taking into account different parameters like stiffness, shape, etc. It should be noted that there are artificial muscles installed in the limbs that make the robot capable of adjusting its limb structure as per the prevailing environment. For example, if it goes from land to water, then it immediately changes its limbs into flippers so that it can easily float over the water.
However, the major point that differentiates this robot from the existing amphibious robots is the use of the same materials that propel it on both land and water and makes it able to efficiently adapt its structure. While, on the other hand, the use of different propulsive systems in the current amphibious robots fosters the waste of energy and makes the whole process inefficient. Hence, Karl Ziemelis, who is the chief physical sciences editor for Nature journal, says, “You can almost think of [adaptive morphogenesis] as a form of evolution on demand.”
To that end, Kramer-Bottiglio added, “Our results show that adaptive morphogenesis can enhance the efficiency of robots that locomote through multiple environments.”

”. It has a lot of practical applications in the field of research and science, including the exploration […]&media=https://wonderfulengineering.com/wp-content/uploads/2022/10/pTtortZW0Urm2SawNOoepKcfRehJvuiRrz49PlmX.jpg){kind=link}