
MIT had done it again, this time with another innovative technology that would allow for safe bomb disposal.
The new creation by MIT is a Robotic Digger Finger capable of penetrating into the ground to sense the surroundings, mainly in search of bombs, you can read more on the design in a paper published in open-access archive arXiv.
The new device is built to distinguish between different objects buried under the ground, it does that using its robotic hand with slender fingers that through vibration dispositions the matter under the ground.
It resembles a mole in its functioning, and these alike capabilities allow the MIT-built device to track underground objects. “The idea is to make a finger that has a good sense of touch and can distinguish between the various things it’s feeling,” study author Edward Adelson explained in a press statement. “That would be helpful if you’re trying to find and disable buried bombs, for example.”
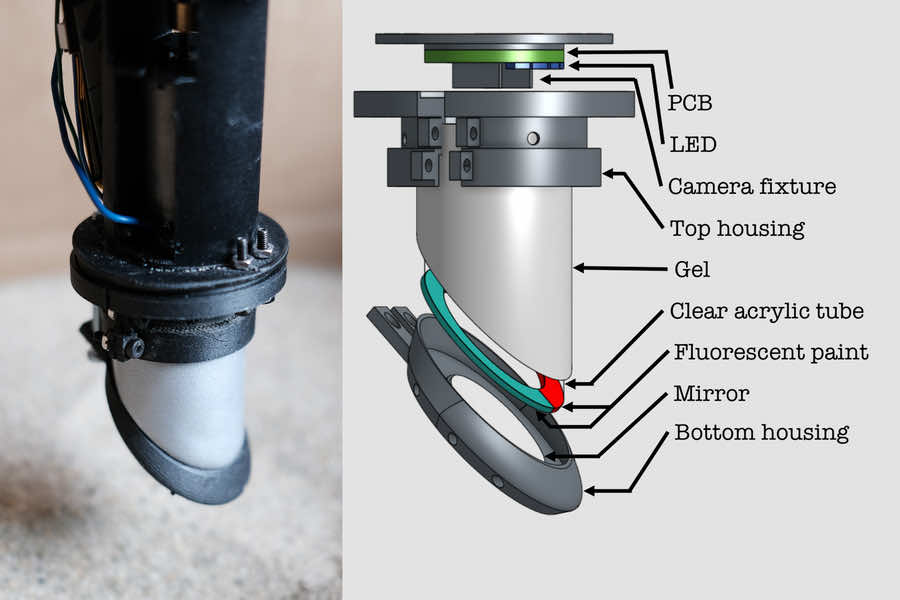
Building the new Digger Finger System, the MIT team used the system used in Tactile Sensor Technology, GelSight. Its thin cylindrical design makes it capable of penetrating into granular material.
“As we get better at the artificial touch, we want to be able to use it in situations when you’re surrounded by all kinds of distracting information,” said Adelson. “We want to be able to distinguish between the stuff that’s important and the stuff that’s not.”
MIT scientists are of the view that their newly built device would aid for more accurate subsurface sensing. A feature that opens doors for the new device to be widely used for multiple applications. The technology used in the Robotic Digger Finger allows it for unparalleled capabilities to hold and sense fragile and preservable objects without damaging the shape and structure of the object. It would also play as a tool for successful bomb disposals, and removal of the mines that lie somewhere beneath the surface.

{kind=link}