
Stanford University researchers have developed a 7.8mm-sized robot that moves around using origami folding and magnets.
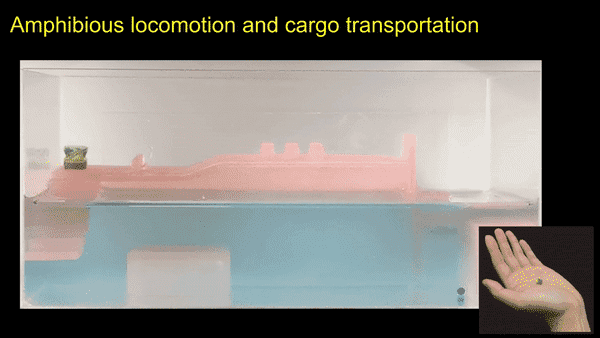
The robot, which can swim through liquids and walk on land, could be employed in specialized medicine distribution and other micro-mode transportation in the future.
Origami-inspired robots aren’t a new concept. In fact, engineers have unveiled many in the last five years. However, according to research published in Nature Communications, this millirobot is the first to be able to explore both land and water while using only one geometric component to move and perform operations.
The ability of the pea-sized robot to use different types of mobility in multiple environments—while carrying a cargo—distinguishes it from other small robots. In addition, the new bot’s adaptability allows it to manoeuvre through, over, and around obstacles.
The robot’s ability to overcome physical hurdles is due to its unique design, crumpled in an origami arrangement known as a Kresling pattern and topped with a magnet. The Kresling design comprises stacked right triangles that wrap around the robot’s midsection, like a ridged and compressed cylinder. The ridges also give it a propeller-like form, which aids movement through a liquid.
“What we really wanted to see is whether we could integrate the geometric features with the foldability of the origami design to achieve effective navigation of the [robot] and also use its foldability mechanism for drug delivery,” says Renee Zhao, an assistant professor of mechanical engineering at Stanford University.
A small hole at one end allows access to the hollow centre of the robot, which can store a small payload such as an object or liquid. The machine can be controlled wirelessly thanks to a magnet at the other end—all the operator needs is their magnet.
Zhao explains that the magnetic field utilised by the researchers is similar to that produced by a magnetic resonance imaging (MRI) machine. “I think one strategy would be to develop this robot so that it is compatible with the MRI system,” she says so that it can be controlled while the patient is in the imaging machine.
According to Zhao, a new device that can generate and manipulate the precise type of magnetic field is also an option. Still, it would need to combine medical imaging, similar to an MRI machine, to track the robot’s location within the body.
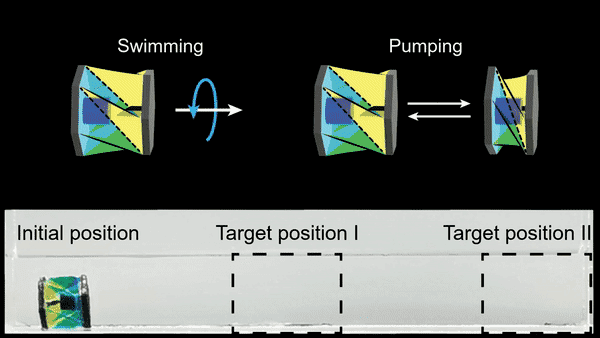
In some versions, a second magnet is attached to the other side of the new robot’s soft, cylindrical construction. This allows the bot to be pumped. A magnetic field operator provides a small amount of rotating force between the magnets, which squeezes the robot’s thin plastic body. Doing so allows fluids to be pumped from the robot’s belly into its surroundings.
The tiny robot is built out of a thin polypropylene-based film that has been folded into a hollow cylinder using Kresling origami; a hollow cylinder made up of folded triangles. A magnetic plate serves as its foundation.
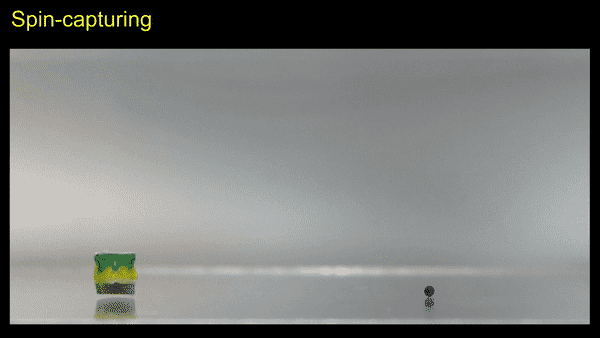
Given the robot’s geometric design and mass, it may be coerced into rolling, flipping, and propelling itself via spinning when exposed to varying magnetic fields. This allows it to travel freely in both air and water.
Theoretically, this method might deliver the liquid or solid drugs directly to specified regions within the body, such as the digestive tract. According to Zhao, the robot was constructed using delicate materials to avoid tissue harm. She points out that even the magnet is mushy. The researchers created it by encasing tiny glass beads and metal nanoparticles in malleable plastic.
The researchers also tested the millirobot’s efficiency in the stomach of a (dead) pig. They discovered that the robot could navigate through the fluid organ and deliver the “medicine” to a specified area.
“The proposed concept of the spinning-enabled amphibious origami robot can be scaled up or down for broader applications,” the authors wrote in their paper.
“With advanced fabrication methods, downsized origami robots can be manufactured for biomedical environments, including blood vessels and ureters.”
“In addition, the internal cavity of Kresling can be utilized to integrate different components within the robot, such as mini-cameras and forceps, enabling multiple biomedical operations, including endoscopy and biopsy.”

{kind=link}