
Autonomous navigation for robotic dogs in crowded places is a big challenge. This kind of robot navigation is useful in different areas like shopping malls, transportation, and healthcare. To make robots move quickly and safely in crowded places and around obstacles, we need to come up with new methods.
The University of Eastern Finland has made smart algorithms to help robots navigate through crowds better. A researcher named Chengmin Zhou presented these algorithms for service robot navigation.
Normally, the robot uses high-tech cameras and sensors to understand its surroundings. This helps the robot move fast in open areas without many obstacles. But in crowded places, the robot has to change direction a lot and might have to stop often.
The current methods need a lot of computer power and aren’t good for quick reactions. So, we can add advanced algorithms into the robot’s computer system to help it handle crowded areas better. These algorithms are called “model-free reinforcement learning algorithms” and help the robot learn from its experiences.
The release talks about three things to improve robot navigation:
- Discrete Actions: This means limiting the robot’s choices when it decides where to go.
- Real-time and Historical Data Integration: This means putting together the data the robot gets right away with the data it learned before. This helps the robot learn from different experiences.
- Exploiting Relational Data: This means the robot uses information about its relationships with obstacles.
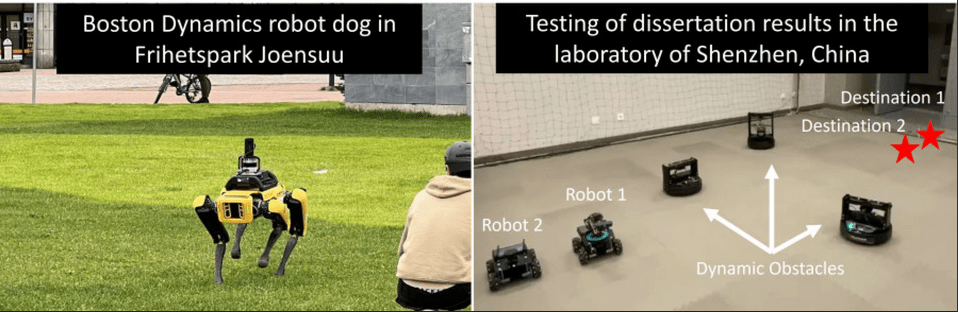
The team tested these new algorithms in computer simulations and in a lab at China’s Shenzhen Technology University. Robotic dogs can be super useful in many areas, like the military, delivering packages, and rescue missions.

If these new algorithms work well, they could change the game for making better and tougher robots. This field is quickly moving forward to make robotic dogs even better.
In August, engineers made a four-legged robot that works like a dog and can run on its own without extra support or control motors to keep it going.

{kind=link}