
A basic touch guides us to a glass of water during the night. This subtle ability is rooted in our skin’s sophisticated sensory system, allowing us to navigate the dark by feeling handrails, walls, and cabinet handles. While humans are visual beings, our sense of touch is advanced, enabling us to quickly perform tasks like grabbing a coffee cup or typing on a keyboard.
Now, a team from China and Singapore has replicated these tactile qualities in artificial skin, known as 3DAE-Skin, combining cutting-edge microfabrication and AI technology.
The 3DAE-Skin mimics human skin’s multilayer structure, utilizing microfabrication techniques to create a flexible device roughly the size of a thumb tip. This artificial skin can sense various forces at a resolution comparable to human touch. The team engineered a three-dimensional electronic skin that separates the detection of direct troops, such as pressure, from the sensation of skin stretching, akin to how human skin works.
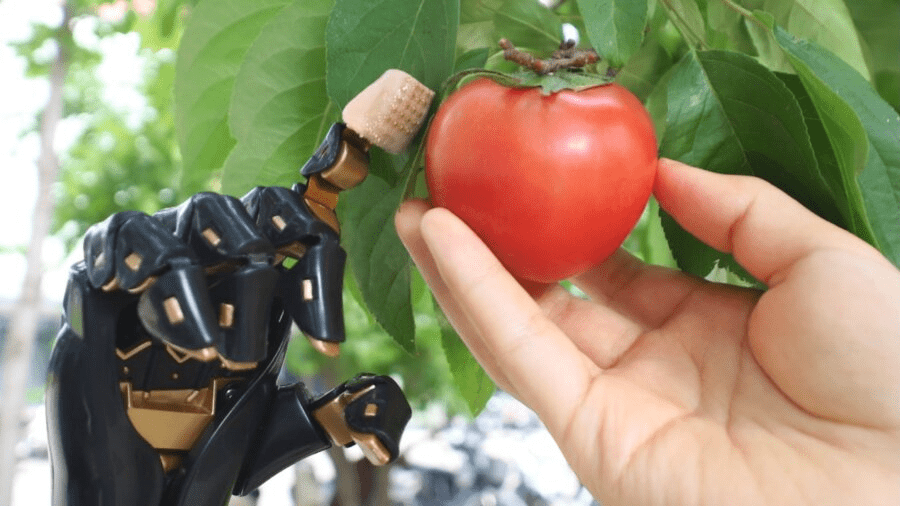
Combining these features with electrical circuits and a custom deep learning algorithm, the 3DAE-Skin can distinguish minute differences in touch. In one study, the artificial skin gauged fruit ripeness and determined the staleness of baked goods, much like a blindfolded but experienced shopper. Although charming, the ultimate goal is not grocery shopping. This strategy suggests that mimicking human skin’s architecture is a promising way to create electronic components that “feel.”
This artificial skin could discern different surface types when embedded in robots or prosthetic hands. Though it currently simulates fingertips, it could be adapted for other body parts or non-humanoid robotic systems, aiding in navigation over uneven terrain or robot-assisted surgeries. The results of this study were published in Science.
Our skin, the body’s largest organ, is often overlooked beyond skincare and occasional scrapes. However, to bioengineers, skin is a marvel, densely packed with sensors for temperature, pain, pressure, vibration, and stretch. Six specific touch sensors are cleverly distributed across the skin’s three-layer architecture.
Merkel cells, found between the top and middle layers, detect external forces like pricks or pinches, converting mechanical data into electrical signals sent to the brain. Deeper in the skin, Ruffini endings monitor skin stretch, allowing us to feel strain without immediate touch. Imitating this setup in artificial skin could make it feel both pokes and stretches simultaneously.
The 3DAE-Skin’s multilayer construction includes nine layers per unit: two force-sensing and two strain-sensing components, with five buffer layers in between. These layers are sandwiched between two flexible, biocompatible materials, enabling the device to withstand twists, pinches, and deformations while sensing pressure and strain like human skin.
For communication, the team added a data acquisition circuit and a signal processing hub to the surface layers. This hub visualizes data from all 240 sensors in the device, deciphering different forces and their origins. The overall device is the size of a thumb tip.
An AI algorithm was developed to translate this data into touch predictions. Trained on 51 simple shapes and nearly 30,000 scenarios, the AI could predict the forces needed to grip objects, such as an overripe banana, and fine-tune its grip based on how the object deforms. In tests, the AI could accurately differentiate between ripe and unripe plums and fresh and stale bread rolls.
While grocery shopping may not be the primary use for artificial skin, this study demonstrates that mimicking human skin’s biology with AI can enhance robotics and prosthetics. These bioinspired 3D designs, combined with microfabrication technologies, set a new standard for biocompatible materials that process multiple sensory inputs with human-like resolution.
Although 3DAE-Skin was initially designed to mimic fingertips, the team concluded that the team concluded that design and fabrication methods are scalable and could potentially extend to other prosthetic and robotic systems.

{kind=link}