
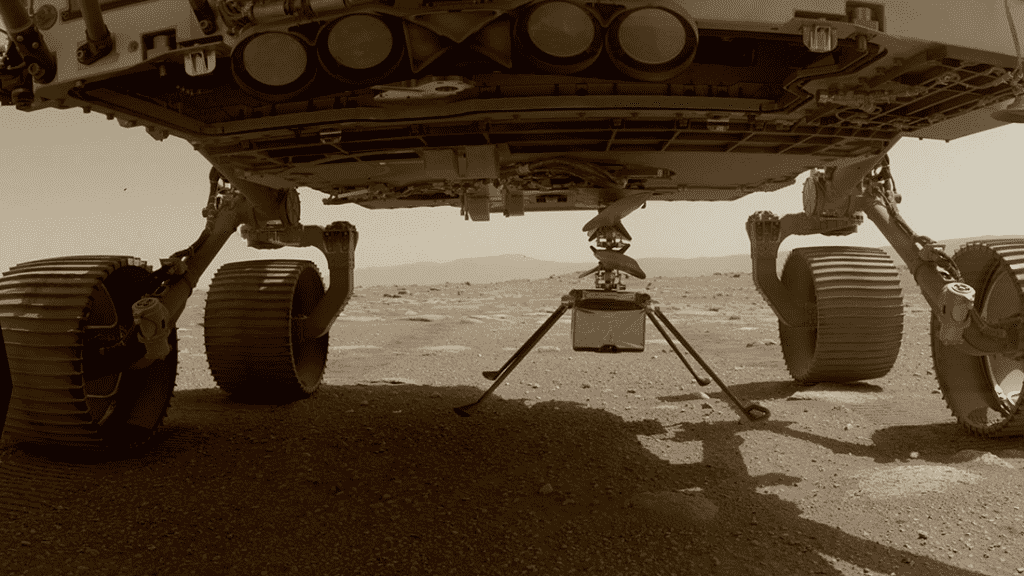
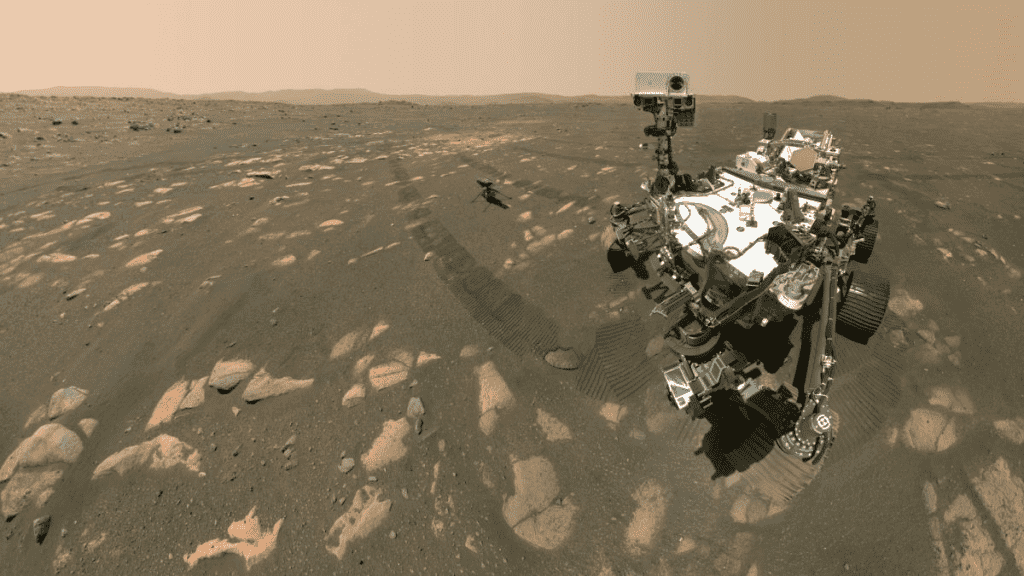
Ingenuity, the small helicopter that accompanied NASA’s Perseverance rover to Mars landed in the Red Planet’s Jezero Crater in February 2021. It went on to make several world’s first records. By its performance so far, it has exceeded design expectations, adding 28 flights under its belt, and reporting back to Earth important data for the exploration of the Red Planet.
However, now, it is facing trouble. It has a dead sensor, according to a NASA blog published on June 6.
“Over the past several sols on Mars, the Ingenuity team has been busily recommissioning the helicopter for flight, going through a series of activities that include preflight checkout of sensors and actuators and a high-speed spin of the rotor. These activities have revealed that one of the helicopter’s navigation sensors, called the inclinometer, has stopped functioning. A nonworking navigation sensor sounds like a big deal – and it is – but it’s not necessarily an end to our flying at Mars,” wrote Håvard Grip, Ingenuity Mars Helicopter Chief Pilot at NASA’s Jet Propulsion Laboratory.
The inclinometer is built with two accelerometers, whose only purpose is to measure gravity prior to spin-up and takeoff; the direction of the sensed gravity is used to determine how Ingenuity is oriented relative to the downward direction. The inclinometer is not used during the flight itself, but without it, NASA is forced to find a new way to initialize the navigation algorithms prior to takeoff.
Luckily, the tasks assigned to the inclinometer can be taken on by other sensors like the inertial measurement unit (IMU).
“Ingenuity’s sensor suite provides some redundancy when it comes to sensing attitude on the ground. The IMU contains accelerometers, which – just like the accelerometers within the inclinometer – can be used to estimate the initial attitude. Unlike the inclinometer, the IMU is not purpose-built for sensing static orientation, so its initial attitude estimates will generally be somewhat less accurate. However, we believe an IMU-based initial attitude estimate will allow us to take off safely and thus provides an acceptable fallback that will allow Ingenuity to resume flying,” explained Grip in his blog.
To fix this, the engineers at NASA need to implement a patch, inserting a small code snippet into the
software running on Ingenuity’s flight computer, intercepting incoming garbage packets from the inclinometer, and injecting replacement packets constructed from IMU data.
NASA’s engineers have prepared themselves for this and had prepared the required software patch needed to fix it.

{kind=link}