
This one comes as an innovation from the faculty of the Institute for Dynamic Systems and Control at ETH Zurich. They are teaching ‘Distributed computation algorithms’ which is a pretty dry discipline. The faculty came up with a better way of teaching the subject rather than using the sets and lengthy exam which is indeed the conventional method. They encouraged students into developing robots which would work on these principles. The result of this unique approach is Distributed Flight Array (DFA). This DFA is a transformer, prototype of course, which allows a number of self-directed robots to assemble with one another into a bigger robot and take flight while providing a platform for experimentation. The ultimate goal would be to remove even the tiniest bit of human touch in this robotic platform.
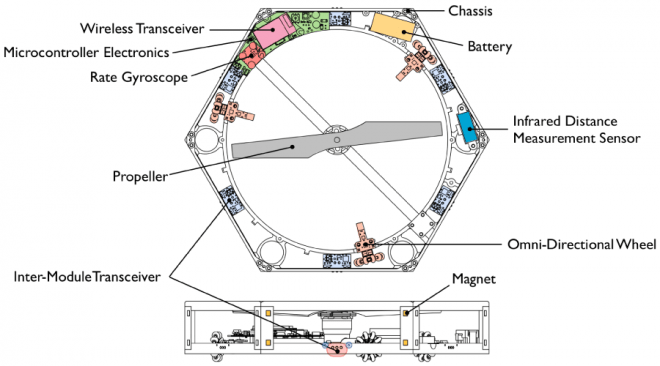
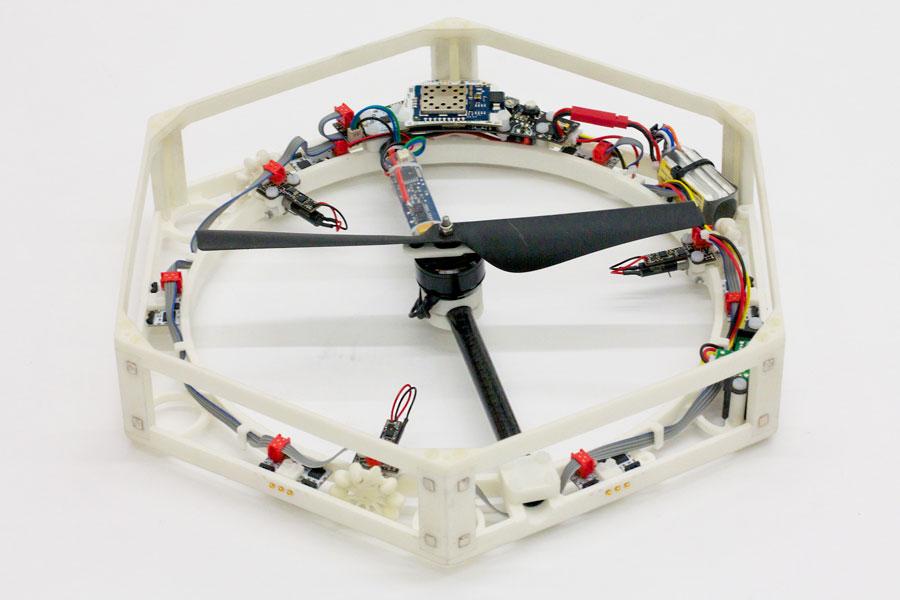
These DFA bots have a 3D printed chassis and there’s more to them than what meets the eye. They are small yet packed full of surprises. The whole system has been designed with a propeller which enjoys the central position. This propeller provides the system with the thrust for the take off. Three omni-directional wheels surround the propeller which allows the DFA bots to get into position while they are on the ground. Then we have magnets that have been embedded into the frame for the sake of connection. Moving on, there is a gyroscope which helps provide the information related to position to the microprocessor which is mounted onboard. The last but crucial piece is the infrared sensor which works in real-time to help them maintain their individual thrusts in order to keep the combined unit stable. Quite a sensitive package, yet at the end of a flight, these robots disengage from one another in mid-air and fall safely on the ground.
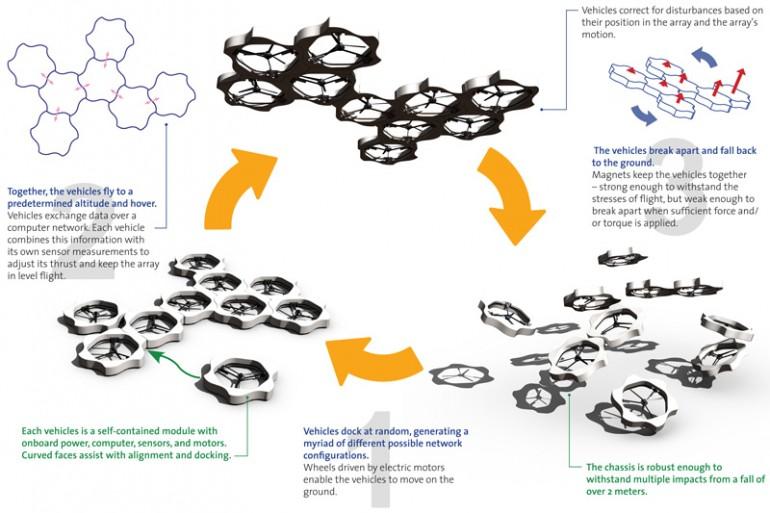
United we stand, divided we fall! This is the rule here too; the bots alone can only move around spastically in the room but join them together and you have a traditional quad-copter which is more advanced. They can simulate typical and asymmetrical arrays which basically defy the conventional aeronautics aesthetics! These combinations, although odd, sometime produce quite fascinating flight patterns which are interesting to watch.

The DFA was basically supposed to be an art installation and a platform dedicated to research by Professor Raffaello D’Andrea at ETH Zurich’s Institute for Dynamic Systems and Controls. However, the student group working under Dr. Raymond Oung have helped it become something much more and today it stands as a unique and quite fascinating teaching tool. Dr. Oung said; ‘The DFA is, and will always be, a pedagogical tool, both for high-end research and for the main-stream public.’ Dr. is confident that this technology will provide the tools for many other researches as well. Dr. Oung also said; ‘What I would love to see is in-flight reconfiguration. Which I think is certainly possible with the current system.’ He further added that they have very little clear use cases and that ‘Apart from being both a research/educational tool, we never designed the DFA with a particular application in mind.’
The sad news is that we might not see a commercial use of these DFA bots, as in words of Dr. Oung; ‘Honestly, I don’t see a mainstream commercial opportunity here.’ However, let’s not kill our hope of this becoming an open source project one day!

{kind=link}
nyc. Bt hope in future it wil become commerical application
awesome work
It is really a wonderful for me.
great work