
A team from the University of Bristol has created the Row-bot – a robot prototype – designed so that it is capable of paddling in dirty ponds or lakes and eats away the microbes that it gathers on it’s paddles. These microbes are then broken down in its ‘stomach’, creating energy for powering itself. This allows the robot to generate enough power to impel itself for as long as there’s bacteria out there to be eaten.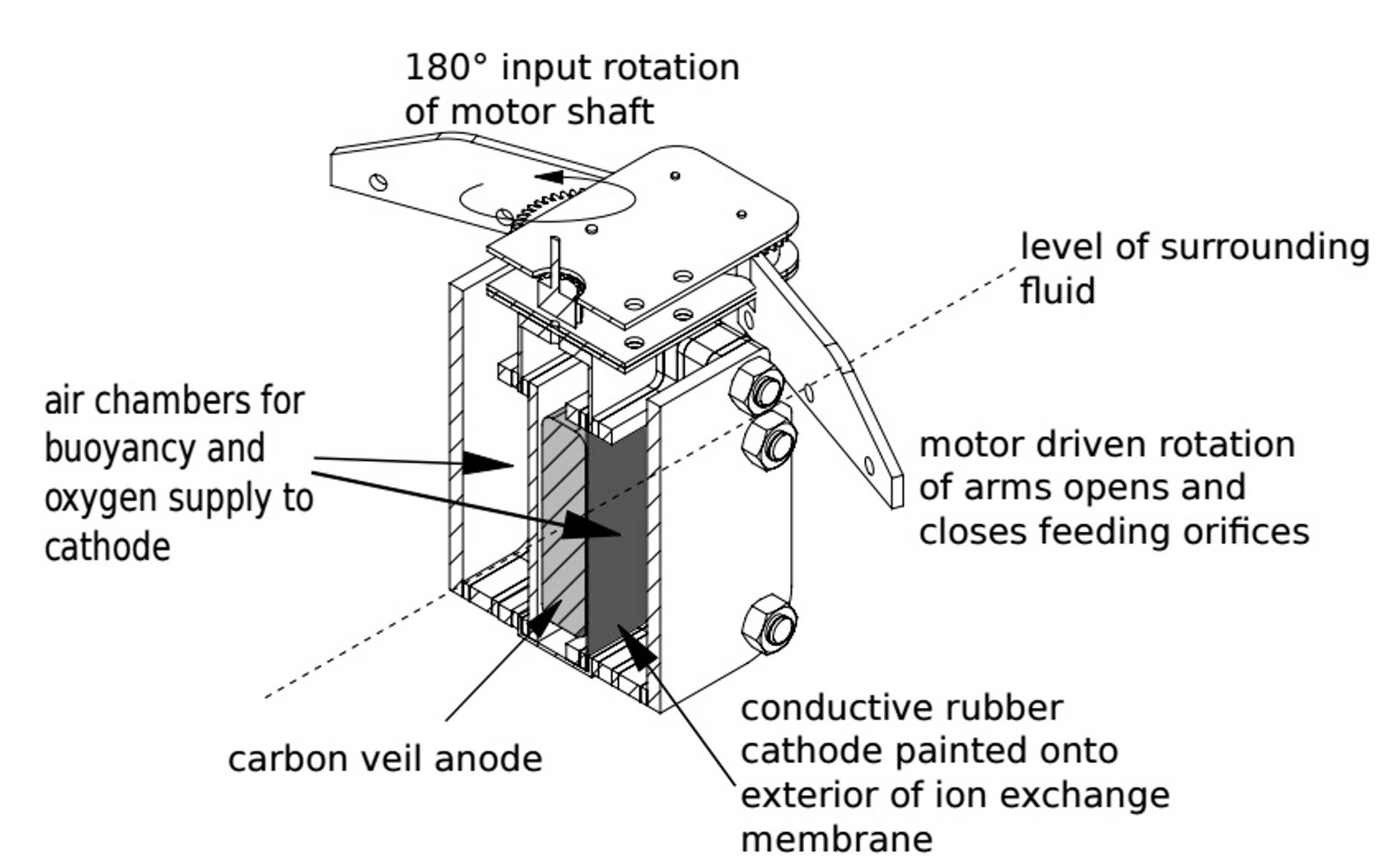
The Row-bot is comprised of two main components; a propulsion mechanism that moves the robot around by making use of a paddle that is operated by a minuscule 0.75 Watt, brushed DC moto and the ‘stomach’ where a microbial fuel cell (MFC) provides with the electric current to the motor for powering the paddle.
The whole system begins to work once the robot gets an input of some water and the MFC creates electricity from the bacteria that is contained within the ingested water. This energy allows the robot to execute a few strokes of the paddle thus allowing it to take in more of the dirty water and the process begins again all over again. It can be said, in simple terms, that it is powered by the medium in which it swims.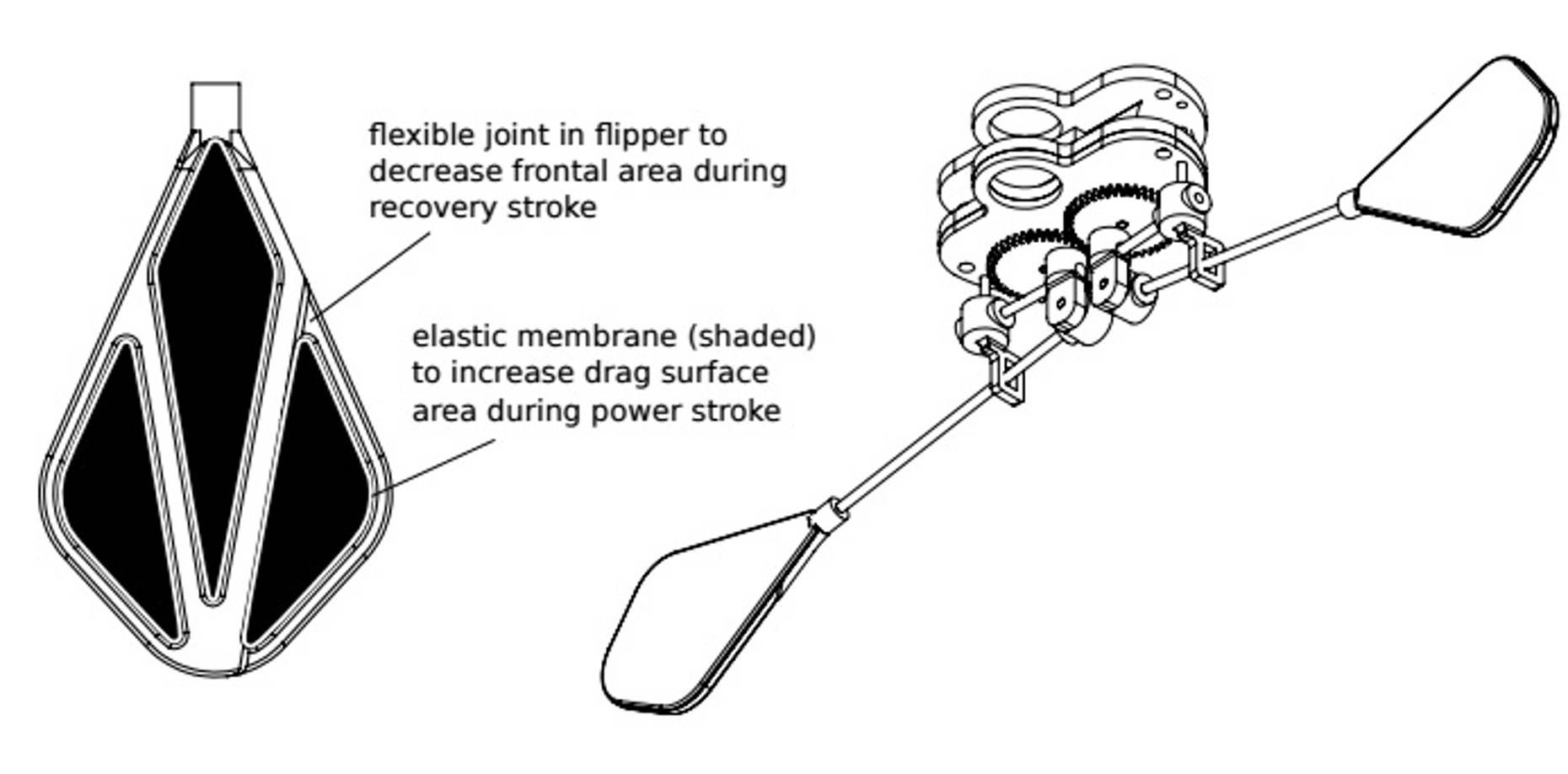
It has been constructed by making use of a 3D printed composite structure that sports a rigid frame supporting an elastic membrane. Every paddle is stretched out for increasing the surface area during power stroke. The membrane features a hinge that changes the paddle’s angle of attack during recovery stroke for reduction in drag.
The MFC that has been incorporated into the Row-bot is quite similar to a normal fuel cell except that is makes use of bacteria for creating an electric current by copying the process of bacterial interactions that are found in nature. The process involves feeding sugar without oxygen to the micro-organisms. As a result, they produce carbon dioxide, electrons and protons.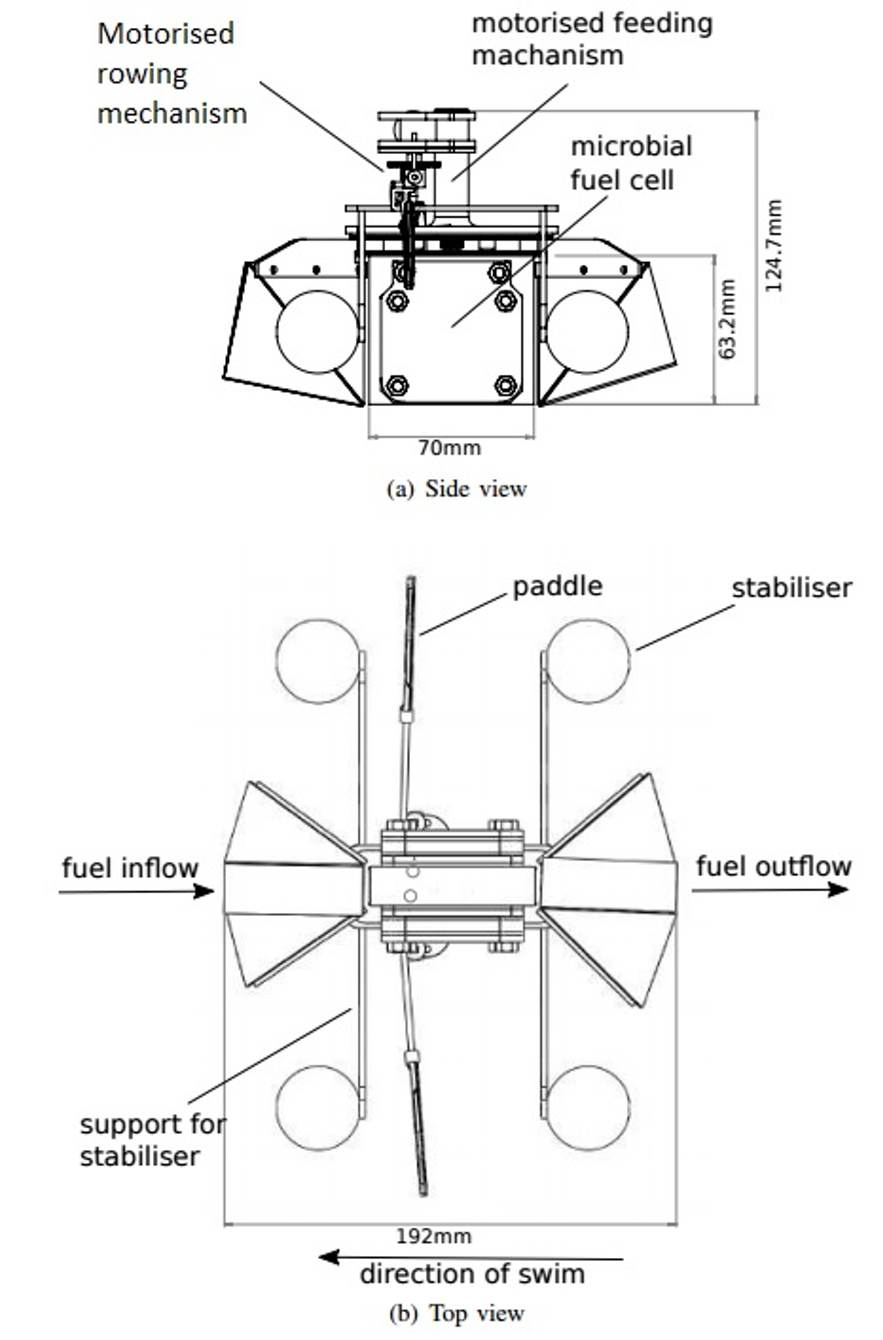
The researchers believe that the device has a lot of potential for a number of uses such as energetically autonomous robot while also catering to environmental monitoring, remote sensing and clean-up. The next slated stage for the Row-bot is the integration of control and monitoring subsystems while also imparting some additional switching circuitry all of which will be powered by the MFC.
The research’s results were presented in a paper at the 2015 IEEE/RSJ International Conference of Intelligent Robots and Systems (IROS) in Hamburg, Germany.

{kind=link}