
The University of Tokyo has created a multimodal locomotive. The locomotive is called “SPIDAR,” the acronym for “SpherIcally vectorable and Distributed rotors assisted Air-ground amphibious quadruped Robot.”
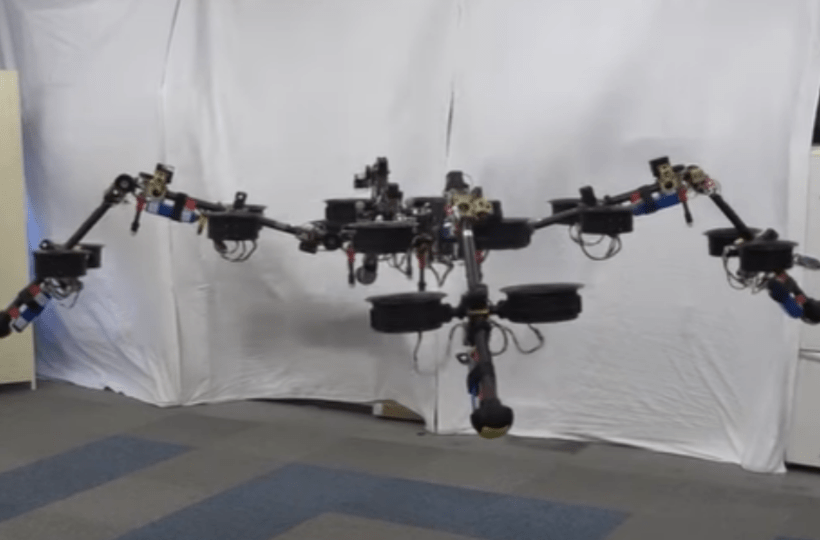
The SPIDAR is a 33-pound robot with movable limbs that are lightweight but still powerful enough to stand on their own. This allows it to be light enough to fly without a jet engine but to maintain its upright position; the spider must maintain a continual bounce.
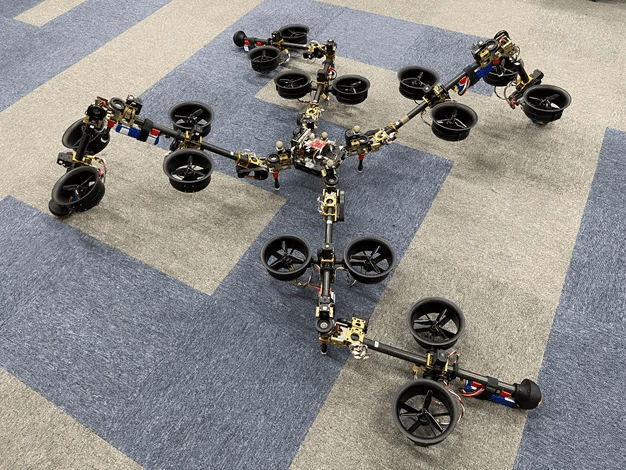
The limbs of SPIDAR have a spherically vectorable dual thruster attached to them. These thrusters allow the SPIDAR to thrust in all directions. It can also roll over and rotate with the help of these limbs. In addition, these limbs and joints have servos attached to them so that the system’s dynamics can operate immaculately.
The servos are a major part of the SPIDAR’s design. However, the mobility of the SPIDAR mainly depends on the thruster system because the servos cannot maintain weight. The SPIDAR is 33 pounds heavy and has eight links and 16 joints. The robot has a total flight time of 9 minutes and can walk for more than twice as long as it can fly.
The basic idea behind conceiving the SPIDAR is to counter the chronic labor shortage in Japan. In addition, the SPIDAR and its likes can assist in doing strenuous labor jobs in the country, like sterilizing the drainage system.
Now, the device is designed to pass into pipelines that are too narrow for humans to examine, measuring 8.3 x 9.8 x 11 inches (21 x 25 x 28 centimeters) and weighing about 7.7 pounds (3.5 kilograms).

{kind=link}