
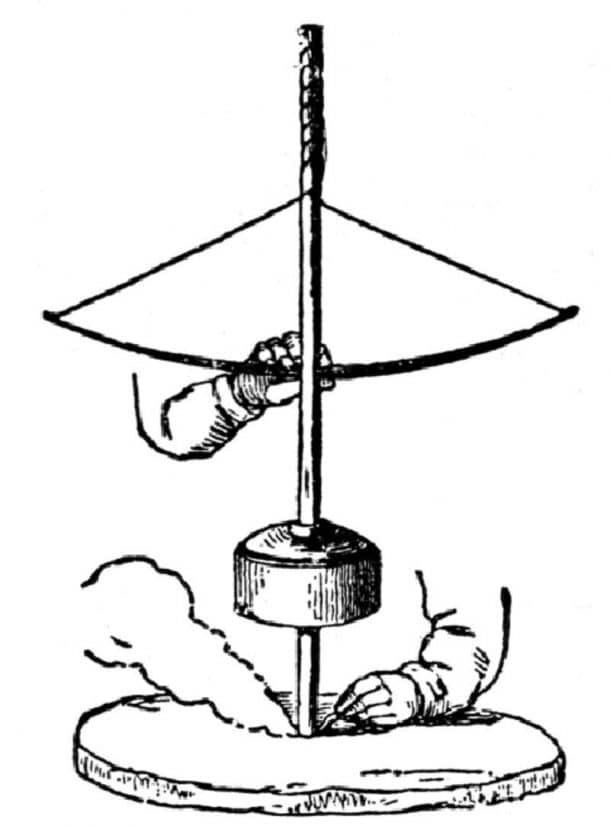
Here’s an actuator that’s simple to use, has a high gear ratio, ample of applications and can be created from just a cheap hobby motor and some string. The concept is known as the “Twisted String Actuator,” and can be built by hooking up two wires to a motor on one side and attaching a load on the other.
The motor twists the wires from one side and makes their effective length shrink, thus pulling the load, and that’s about it! The idea is so simple that it even appears in several kids’ project books like Vacuum Bazookas, Electric Rainbow Jelly and Ink Sandwiches, Electric Worms, and 37 Other Experiments for Saturday Science where simple Arduino programs are used to build robots.

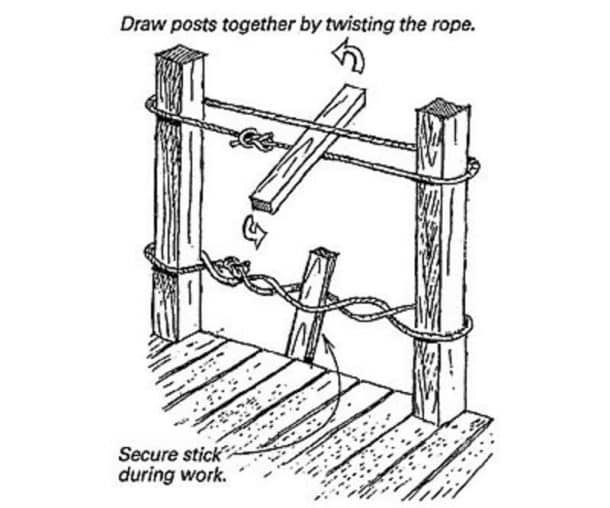
The idea has also been applied in ancient times.

The actuator has also been mentioned in several academic papers as well, with Hod Lipson (et al.) writing a paper titled “Mini Twist: A Study of Long-Range Linear Drive by String Twisting.” The paper dwells on theoretical models and the empirical data on displacement, tension, and force of a host of string configurations changed by using different strands and materials.
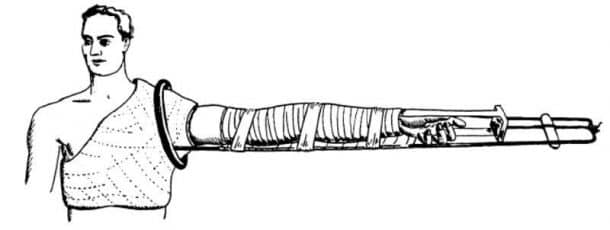
Meanwhile, Dexmart has been using the same setup to lift as high as 7 kilograms with just a 12.4mm diameter motor. (Papers can be read here: 1, 2, 3, 4, 5. )
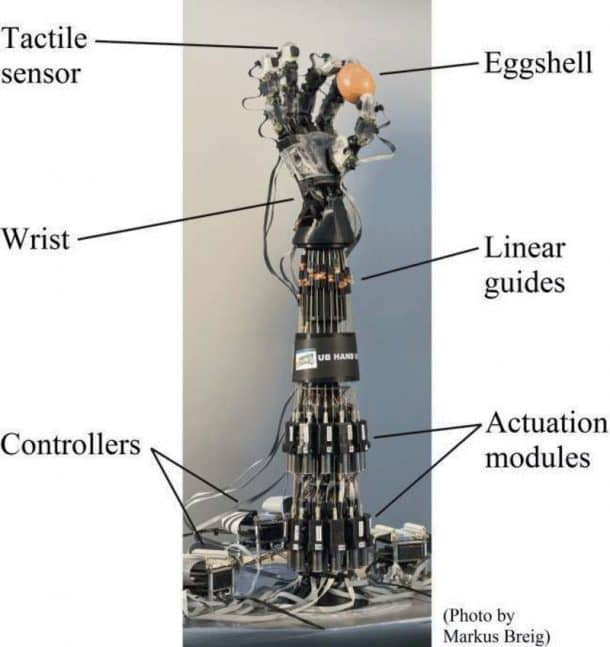
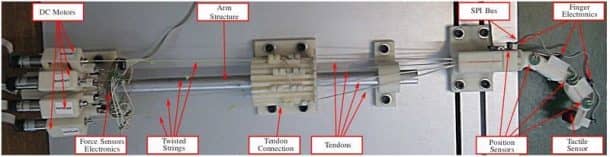
Dexmart has also created tendon-driven robot hands using the same principle.
But still these actuators are not “catching on” as we suppose they should. Firstly, they have small life-cycles, in thousands instead of millions. Secondly, they have a non-linear response (twists vs. displacement) which requires them to have a very precise calibration for precise movements.
Also, they are inherently linear motors, where a spring return mechanism or two opposing motors are to be added to create rotary motion. So although, they might not be perfect for precision robots but they can be used for elder-care robots like Paro or other toys.

Here is another great paper detailing some more applications of the concept.

{kind=link}