
Robots are now learning to walk by themselves. What’s next? They’ll learn how to think by themselves, ponder upon the impact humans have on the environment by themselves, realize that humans are akin to a disease on Earth by themselves, and next thing you know the machines take over everything. They start building more machines and terminators to wipe out the human race.
Okay ignoring my paranoid rant, this robot that is basically a pair of legs is capable of learning and It learned how to walk all by itself. The robot is called Cassie being developed in Berkeley, the University of California. Cassie has learned how to walk while being crouched and how to walk while carrying a load all by herself.
Well, The AI behind Cassie was trained using reinforcement learning, which is a training technique that teaches the AI desired behaviors through a series of trials and errors. Teaching a robot to do stuff isn’t hard if you hand-code the behavior into it but getting a robot to learn stuff on its own is hard as it requires the AI to write the code by itself time after time before it gets it right.
You check out Cassie in the video below.
Reinforcement learning can be a hard and long process. Recent videos from Boston Dynamics show robots dancing, running over obstacles, etc. While that may seem impressive most of those behaviors are pre-choreographed and programmed. Cassie had to learn all by herself.
According to Zhongyu Li of Berkeley, “These videos may lead some people to believe that this is a solved and easy problem. But we still have a long way to go to have humanoid robots reliably operate and live in human environments”.
Cassie was trained using a technique called double simulation. Training a robot in the real world is hard and costly as little mistakes may wreck the robot beyond repair. The team at Berkeley first trained Cassie virtually by creating a simulated version of her that learned to walk from an existing database of robot movements. This virtual Cassie was then moved to SimMechanics, a virtual environment that mirrors real-world physics as accurately as possible.
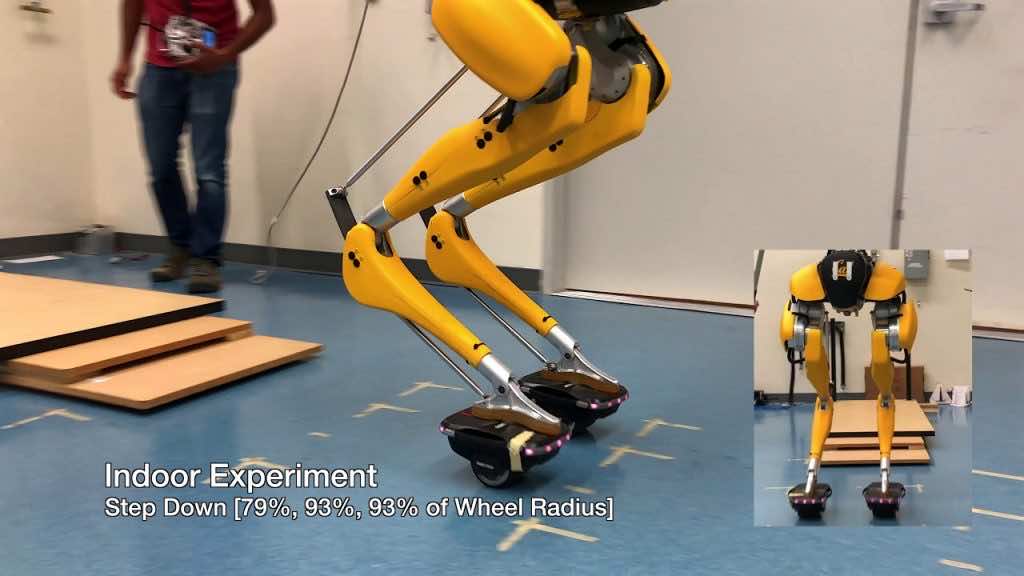
It was only after training in both environments that the walking model was loaded into the real-world Cassie. And voila, no extra fine-tuning was required as Cassie could walk across rough and slippery terrain, carry unexpected loads, and recover from being pushed all by herself.
Cassie, the robot waifu we need but do not deserve.

{kind=link}