
Researchers have made significant strides in understanding the locomotion of insects by combining research on both live and robotic insects. This innovative approach has shed light on how insects sense forces in their limbs while walking, providing valuable insights into the biomechanics and neural dynamics of these creatures and paving the way for new applications in the field of large legged robots.
At the heart of this research are the campaniform sensilla (CS), force receptors found in the limbs of insects. These receptors respond to stress and strain, playing a crucial role in controlling locomotion. Interestingly, similar force receptors called Golgi tendon organs exist in mammals, including humans. Therefore, studying the function of force sensors in insects may also yield valuable information about their role in vertebrates.
Dr. Szczecinski, an assistant professor in the Department of Mechanical and Aerospace Engineering at West Virginia University, explains the significance of force sensors in walking insects. “These sensors are critical for successful locomotion,” he says. “The feedback they provide is essential for maintaining proper posture and coordination.”
By utilizing robotic models instead of computer models, researchers can achieve more realistic representations of friction between moving parts and incorporate delays in neural signaling. Robotic limbs offer the advantage of recording every single signal and mechanical action, a feat not possible with live animals.
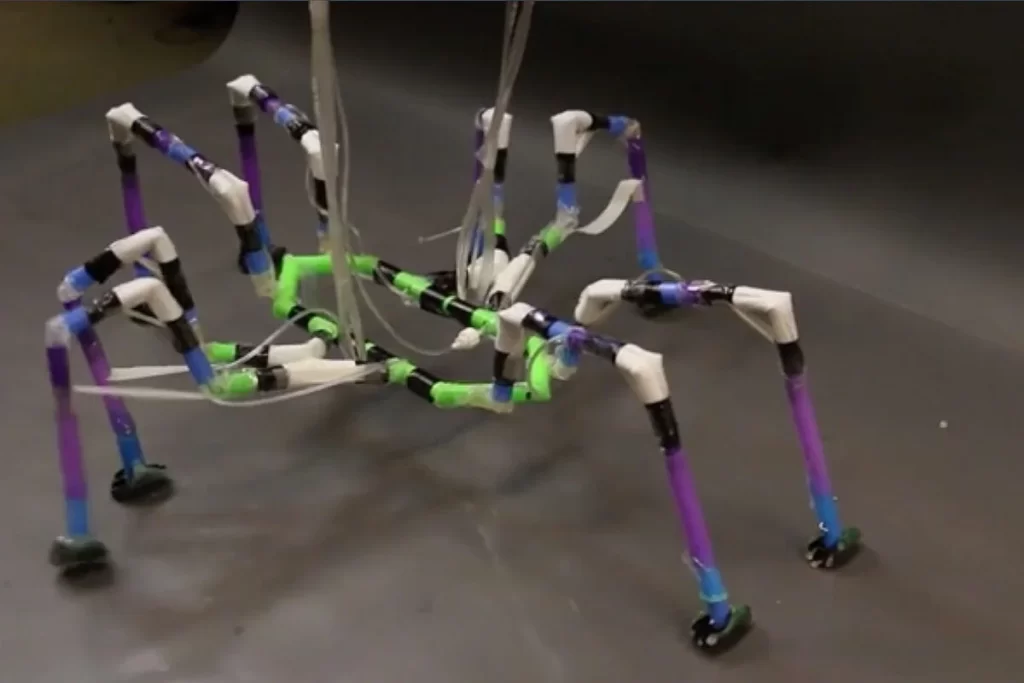
Dr. Szczecinski’s research involves two main robotic models. The first is a biomimetic robot inspired by the fruit fly, which walks on six legs and provides a comprehensive understanding of how campaniform sensilla monitor forces during walking. The second model consists of a single leg, enabling a simplified simulation of the sensory experience of an insect leg while walking.
To further explore the role of CS in real insects, Dr. Szczecinski isolates their limbs and monitors sensory pathways using electrodes. By applying different forces, the team records sensory signals, which are then used to develop models for the robotic legs.

Through this research, Dr. Szczecinski has discovered strong similarities between real insects and their robotic counterparts. “Our model effectively describes the way the CS convert forces into neural activity for every insect species we have studied,” he notes. This finding suggests a broad functionality of these organs across different species.
The implications of this research extend beyond understanding insect locomotion. Walking robots developed based on these findings could serve as prototypes for machines designed to navigate extreme terrains, explore other planets, or monitor forests for environmental health.
By unraveling the intricacies of how insects sense forces in their limbs while walking, researchers are unlocking new possibilities for the advancement of robotics and expanding our understanding of locomotion in both the insect and vertebrate worlds.

{kind=link}