
Researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have developed a new type of soft, robotic gripper that uses thin tentacles to get a hold of fragile or priceless objects.
It took simple inflation for the gripper to wrap around the desired object. The system doesn’t need sensing, planning, or feedback control.
“With this research, we wanted to reimagine how we interact with objects,” said Kaitlyn Becker, former graduate student, a postdoctoral fellow at SEAS, and first author of the paper, in a press release published by the institution. “By taking advantage of the natural compliance of soft robotics and enhancing it with a compliant structure, we designed a gripper that is greater than the sum of its parts and a grasping strategy that can adapt to a range of complex objects with minimal planning and perception.”
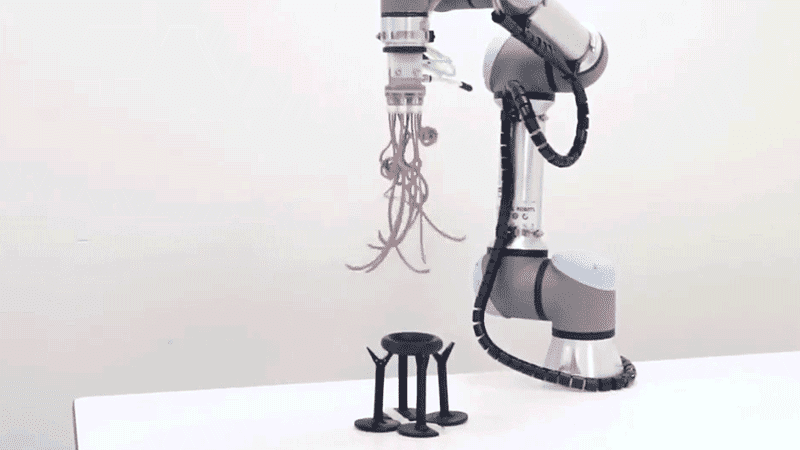
The filaments are almost a foot long and made of rubber tubes. The tubes are hollow from the inside. One side of the tube is thicker than the other. This particular structure helps the tube curl quickly when pressure is applied and wraps around the object.
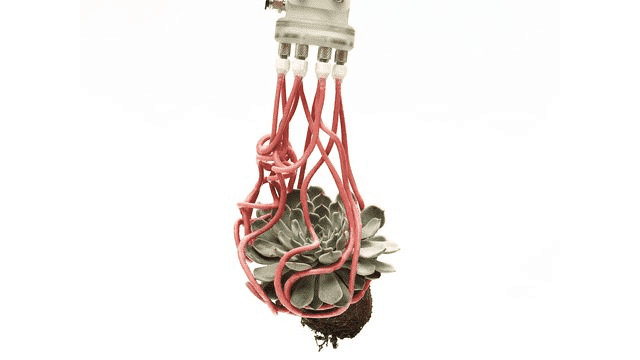
The researchers tested the system on houseplants and toys. It could be used while picking up fruits and vegetables in agricultural applications, or in settings where delicate tissue operations are needed.
“Entanglement enables each highly compliant filament to conform locally with a target object leading to a secure but gentle topological grasp that is relatively independent of the details of the nature of the contract,” said Professor L. Mahadevan, the Lola England de Valpine Professor of Applied Mathematics in SEAS, and of Organismic and Evolutionary Biology, and Physics in FAS and co-corresponding author of the paper.
“This new approach to robotic grasping complements existing solutions by replacing simple, traditional grippers that require complex control strategies with extremely compliant, and morphologically complex filaments that can operate with effortless control,” said Wood, the Harry Lewis and Marlyn McGrath
Professor of Engineering and Applied Sciences and co-corresponding author of the paper. “This approach expands the range of what’s possible to pick up with robotic grippers.”
The research has been published in the Proceedings of the National Academy of Sciences (PNAS).

 have developed a new type of soft, robotic gripper that uses thin tentacles to get a hold of fragile or priceless objects. It took simple inflation for the gripper to wrap around the desired object. The system doesn’t need sensing, planning, […]&media=https://wonderfulengineering.com/wp-content/uploads/2022/10/imgonline-com-ua-resize-FNDPRMlitaaPaW9.jpg){kind=link}