
Scientists at the Massachusetts Institute of Technology (MIT) have made a groundbreaking discovery in the field of robotics by creating a robotic finger that closely mimics the dexterity and sensing abilities of a human digit. This innovation, dubbed “GelSight Svelte,” represents a significant leap forward in the development of robots that can interact with their environments more effectively.
“Because our new sensor is human finger-shaped, we can use it to do different types of grasps for different tasks, instead of using pinch grasps for everything. There’s only so much you can do with a parallel jaw gripper. Our sensor really opens up some new possibilities on different manipulation tasks we could do with robots,” said in a statement Alan (Jialiang) Zhao, a mechanical engineering graduate student and lead author of a paper on GelSight Svelte.
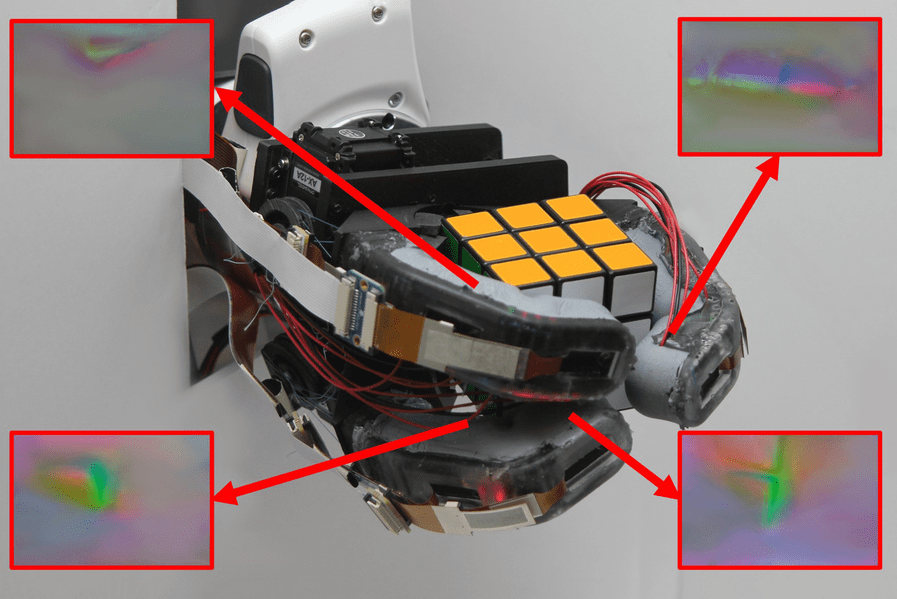
The key to this robotic finger’s remarkable capabilities lies in a sophisticated camera system equipped with two mirrors that run the length of the finger. This camera setup enables the robotic finger to perceive objects with a level of detail and precision that was previously unattainable. It can visualize objects from top to bottom, just as a human finger would when grasping an item.
The development of GelSight Svelte was not without its challenges. The team of scientists, led by Zhao, had to employ various techniques and conduct numerous experiments to bring the finger sensor to a level of functionality that closely approximated the human sense of touch and perception. They experimented with LED lights and other tools that the sensor uses to gain a nuanced understanding of the objects it interacts with.
Zhao explained the difficulties they encountered during the development process, stating that achieving the correct curvature for the mirror to match their simulation was a particularly challenging aspect. Additionally, various components of the robotic finger presented unique quirks, making it challenging to source the appropriate parts for the device. Ultimately, the development of GelSight Svelte required extensive experimentation, trial and error, and persistence.
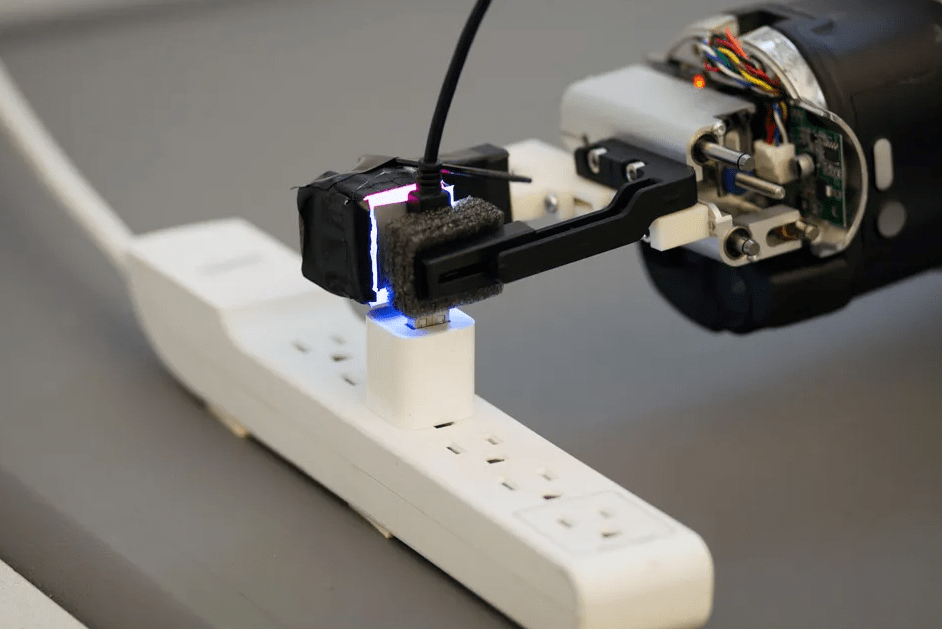
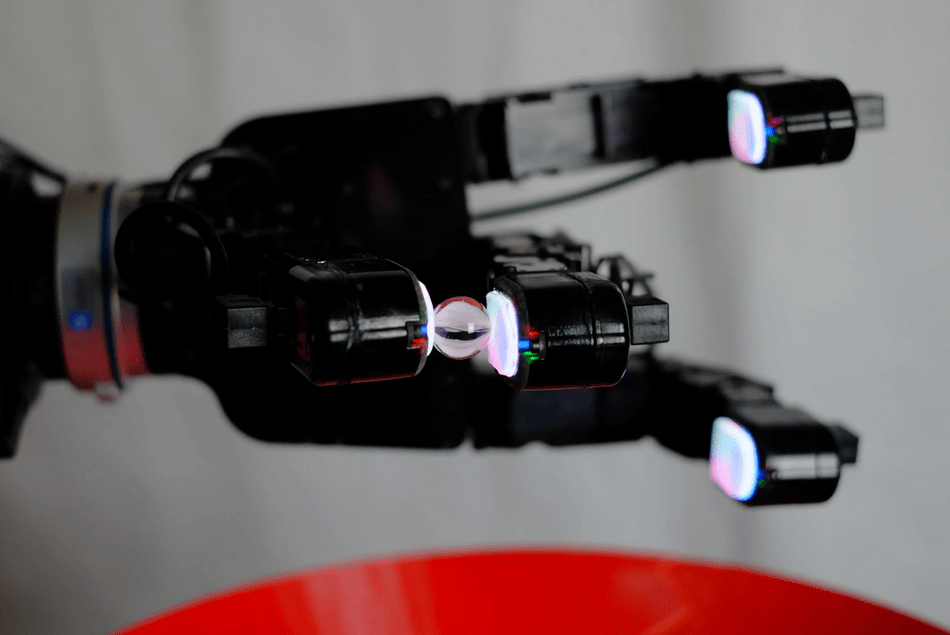
Once the researchers arrived at the optimal design, they integrated three of these sensors into a single robotic hand and conducted tests involving three distinct types of grasping maneuvers: a pinch grasp, a lateral pinch grasp, and a power grasp. These tests demonstrated the finger’s ability to perform intricate and controlled actions similar to those of a human hand.
Monroe Kennedy III, an assistant professor of mechanical engineering at Stanford University, who was not involved in the research, highlighted the significance of optical-tactile finger sensors in the realm of robotics.
He emphasized that these sensors enable robots to use cost-effective cameras to capture high-resolution images of surface contact, providing vital data on the precise contact shape and the necessary force to properly grasp an object. This innovation leverages differences in images and machine learning to empower robotic devices to emulate human-like grasping motions effectively.
In addition to its potential in robotics, this invention holds promise in the field of prosthetics. Modern prosthetic hands and fingers often incorporate robotic technology to restore natural range of motion and functionality to individuals who have lost their hands or fingers due to injury or amputation.
These prosthetic devices can be controlled using the user’s remaining limb muscles or brain-computer interfaces. The ability to closely mimic real digits is crucial for their successful implementation, and GelSight Svelte’s advancements in sensory perception could play a pivotal role in improving the sense of touch for prosthetic users.
“Improving a robot’s sense of touch to approach human ability is a necessity and perhaps the catalyst problem for developing robots capable of working on complex, dexterous tasks,” he added.
In conclusion, MIT’s development of GelSight Svelte represents a significant achievement in robotics and sensory technology. This innovative robotic finger has the potential to enhance the capabilities of robots in various fields, from manufacturing to healthcare, and improve the quality of life for individuals who rely on prosthetic hands and fingers.
The journey to create GelSight Svelte was marked by persistence, experimentation, and a commitment to pushing the boundaries of what is possible in the realm of robotics.

 have made a groundbreaking discovery in the field of robotics by creating a robotic finger that closely mimics the dexterity and sensing abilities of a human digit. This innovation, dubbed “GelSight Svelte,” represents a significant leap forward in the development of robots that can interact with their […]&media=https://wonderfulengineering.com/wp-content/uploads/2023/10/ezgif.com-resize-75.jpg){kind=link}