
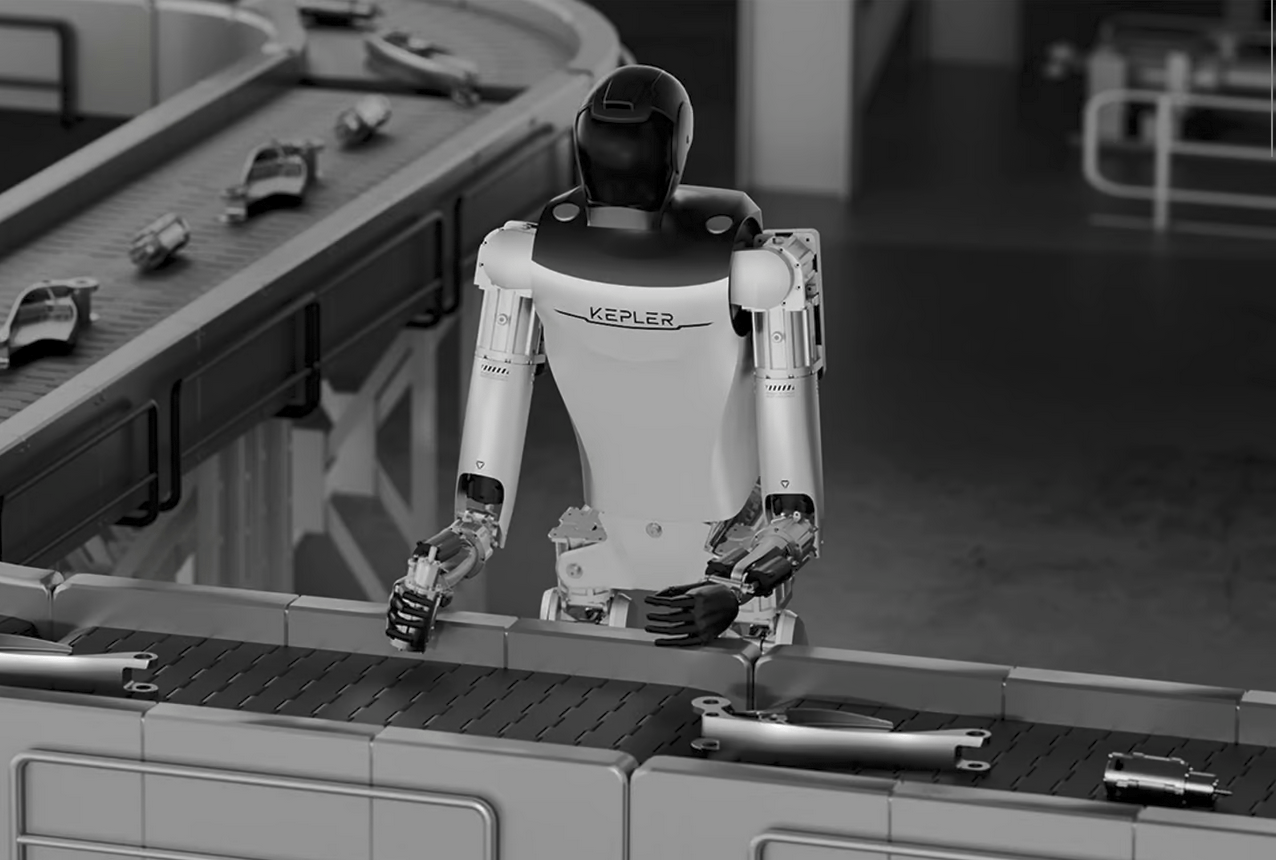
China’s Kepler Exploration Robot Company is set to unveil its Kepler Forerunner humanoid robot at CES, presenting it as a direct competitor to Tesla’s Optimus robot. The Forerunner, standing at 178 cm (5 ft, 10 in) tall and weighing 85 kg (187 lb), is priced at around $30,000, making it a bit more expensive than the latest estimate for Tesla’s Optimus, which is less than $20,000.
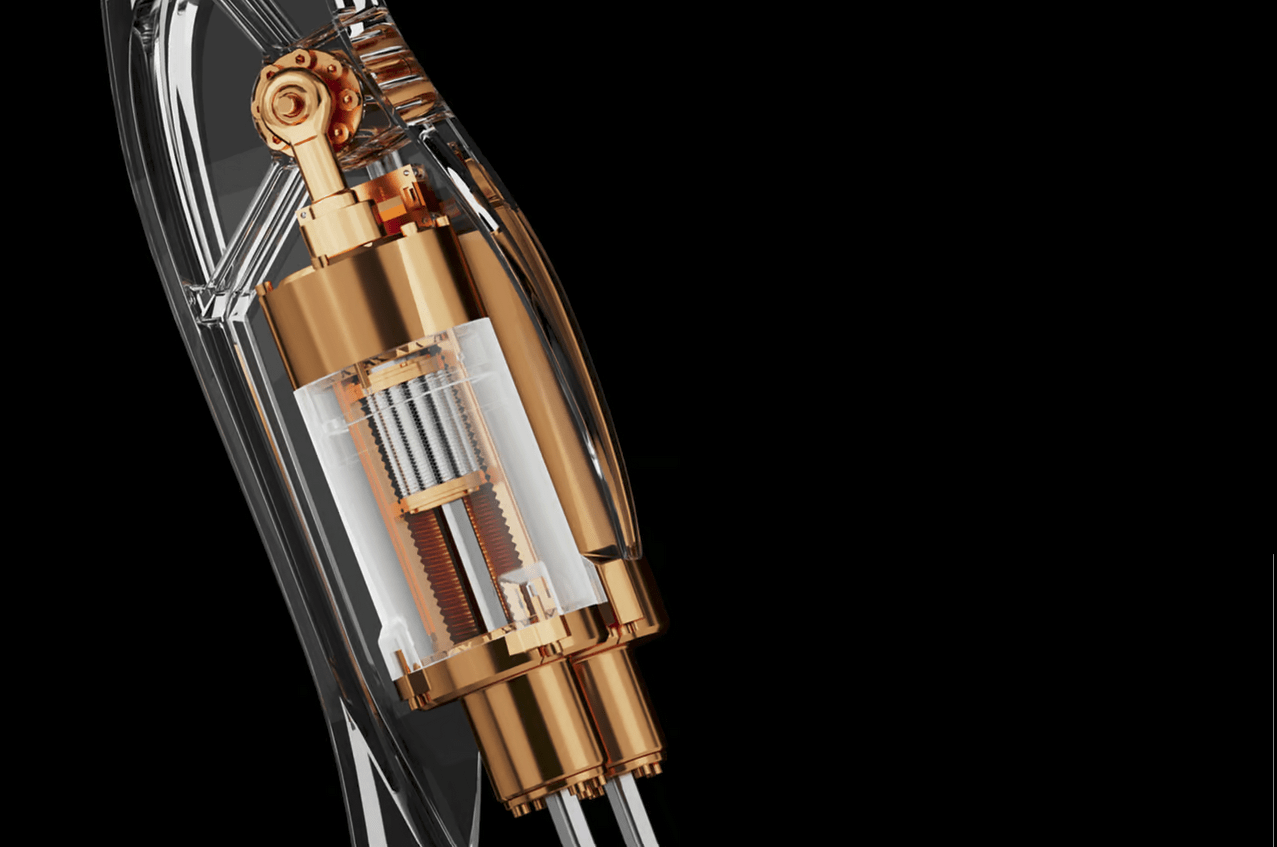
One of the key features of the Forerunner is its proprietary planetary roller screw actuators in its arms and legs, providing up to 8,000 Newtons (1,798 pound-force) of thrust to the elbow, knee, and ankle joints. These actuators are designed to deliver precision control, enhanced power, and quick responsiveness, allowing the robot to handle complex tasks adeptly.

The Forerunner is equipped with custom rotary actuators for its waist and shoulder joints, and it perceives its surroundings through a group of sensors located in its head. These sensors include a wide-angle binocular camera, a far-field array of four microphones, an accelerometer, and an attitude and heading reference system. The robot can communicate with people using a synthetic voice module and stereophonic speakers.
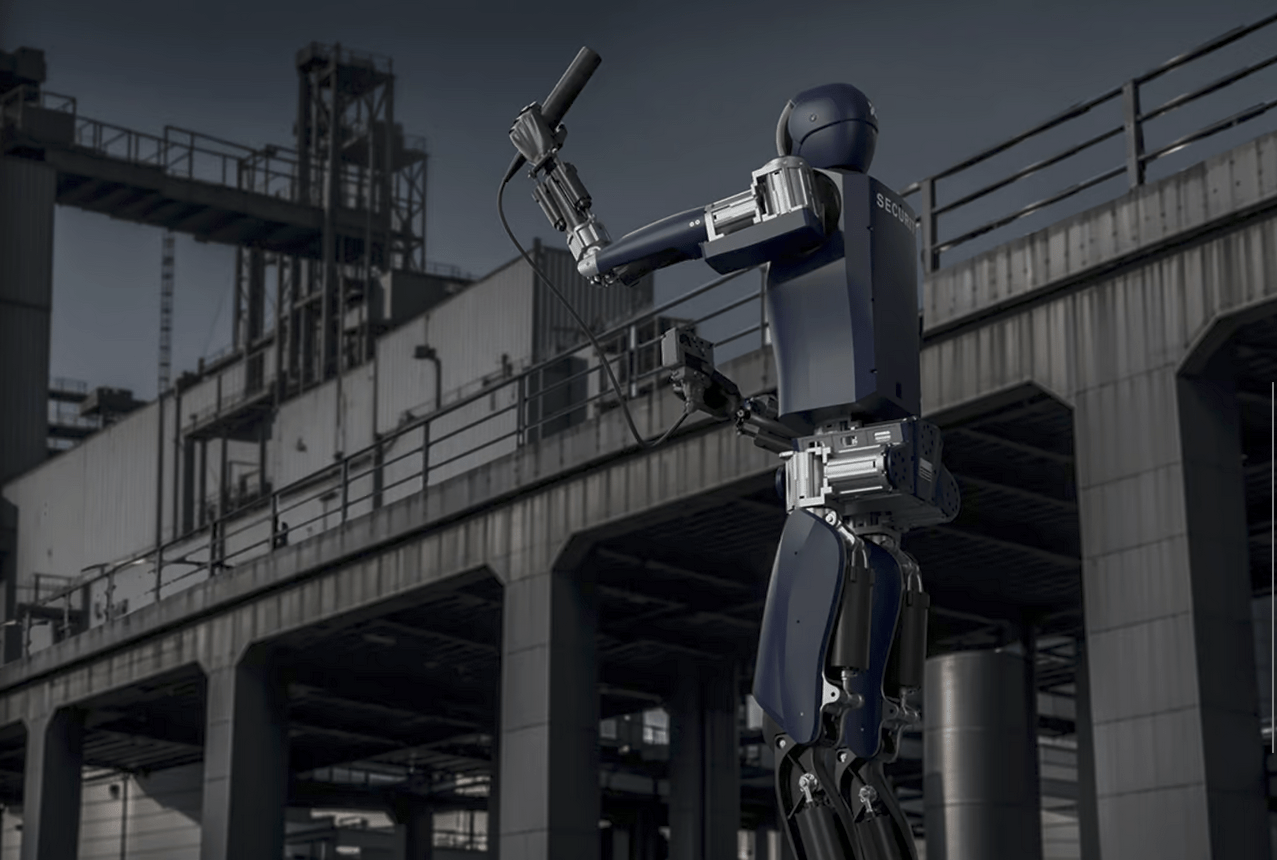
All sensory data is processed through Kepler’s proprietary Nebula AI system, enabling the robot to navigate complex environments, avoid obstacles, and perform tasks such as sensing, grasping objects, and carrying heavy loads. While the lifting/carrying capacity hasn’t been specified, Kepler indicates that several versions of the Forerunner will be available, targeting applications in manufacturing, inspection, high-risk tasks, outdoor work, and robotics research and education.
Production and shipping for the Kepler Forerunner are expected to commence in the third quarter of the year. This humanoid robot contributes to the growing landscape of advanced robotics, with applications ranging from industrial use to research and education. As companies like Kepler and Tesla explore humanoid robotics, these developments signify advancements in precision control and adaptability for various tasks.

 tall and weighing 85 kg (187 lb), is priced at around $30,000, making it a bit more expensive than […]&media=https://wonderfulengineering.com/wp-content/uploads/2024/01/assets.newatlas-ezgif.com-resize.jpg){kind=link}