
MIT researchers have created PIGINet, a new system that improves household robots’ problem-solving abilities more efficiently. By using PIGINet, planning time can be reduced by 50-80 percent. This information was shared in a press release by MIT on Friday.
Typically, household robots follow fixed instructions for tasks, which may not always work well in different or changing environments. PIGINet, developed by MIT, is a neural network that considers “Plans, Images, Goal, and Initial facts” to predict the likelihood of refining a task plan and finding practical motion plans.

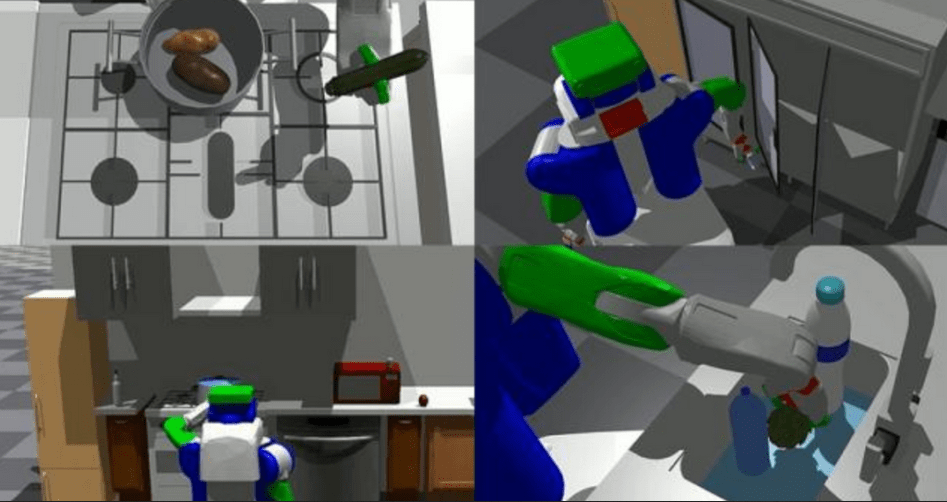
To test PIGINet’s effectiveness, the team focused on assisting a robot in the kitchen. They compared the time it took to solve problems with PIGINet to previous methods.
The results showed that PIGINet significantly reduced planning time by 80 percent in simpler scenarios and 20-50 percent in more complex scenarios.
“Systems such as PIGINet, which use the power of data-driven methods to handle familiar cases efficiently, but can still fall back on “first-principles” planning methods to verify learning-based suggestions and solve novel problems, offer the best of both worlds, providing reliable and efficient general-purpose solutions to a wide variety of problems,” said MIT Professor and CSAIL Principal Investigator Leslie Pack Kaelbling.

The researchers also utilized pretrained vision language models and data augmentation techniques to overcome the lack of adequate training data for household robots.
“Because everyone’s home is different, robots should be adaptable problem-solvers instead of just recipe followers. Our key idea is to let a general-purpose task planner generate candidate task plans and use a deep learning model to select the promising ones. The result is a more efficient, adaptable, and practical household robot, one that can nimbly navigate even complex and dynamic environments. Moreover, the practical applications of PIGINet are not confined to households,” said Zhutian Yang, MIT CSAIL PhD student and lead author on the work.
“Our future aim is to further refine PIGINet to suggest alternate task plans after identifying infeasible actions, which will further speed up the generation of feasible task plans without the need of big datasets for training a general-purpose planner from scratch. We believe that this could revolutionize the way robots are trained during development and then applied to everyone’s homes.”
“This paper addresses the fundamental challenge in implementing a general-purpose robot: how to learn from past experience to speed up the decision-making process in unstructured environments filled with a large number of articulated and movable obstacles,” said in the statement Beomjoon Kim PhD ’20, assistant professor in the Graduate School of AI at Korea Advanced Institute of Science and Technology (KAIST).

{kind=link}