
MIT engineers have come up with a revolutionary way to build robots that can be quickly reconfigured for various missions on the moon.
Dubbed WORMS (Walking Oligomeric Robotic Mobility System), this universal robotic parts kit consists of worm-inspired robotic limbs that can be snapped onto a base and configured to build different types of robots.
The idea is to create a shed on the moon that contains shelves of WORMS parts that astronauts can select and snap together with the right shoes, body, sensors, and tools, disassemble them, and make a new one as needed.
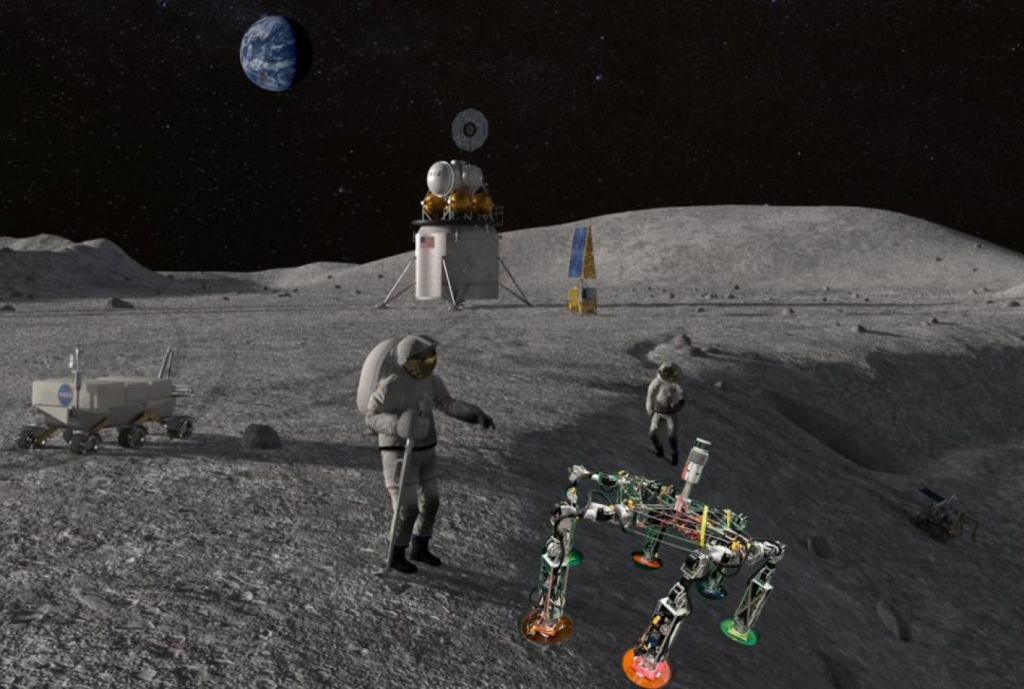
This approach is not only flexible but also sustainable, as it can save costs while meeting various mission requirements. The team behind WORMS won the Best Paper Award at the IEEE Aerospace Conference, They demonstrated a six-legged robot designed for navigating the extreme terrain of the moon’s South Pole, where thick, fluffy dust, steep, rocky slopes, and deep lava tubes present significant challenges.
The team took inspiration from animals and brainstormed concepts about where certain animals could be suited to specific missions. For instance, a spider-like robot could explore a lava tube, while a line of elephant-like robots could carry heavy equipment while supporting each other down a steep slope.
Meanwhile, a goat tethered to an ox-like robot could help lead the larger animal up the side of a hill while transporting an array of solar panels.
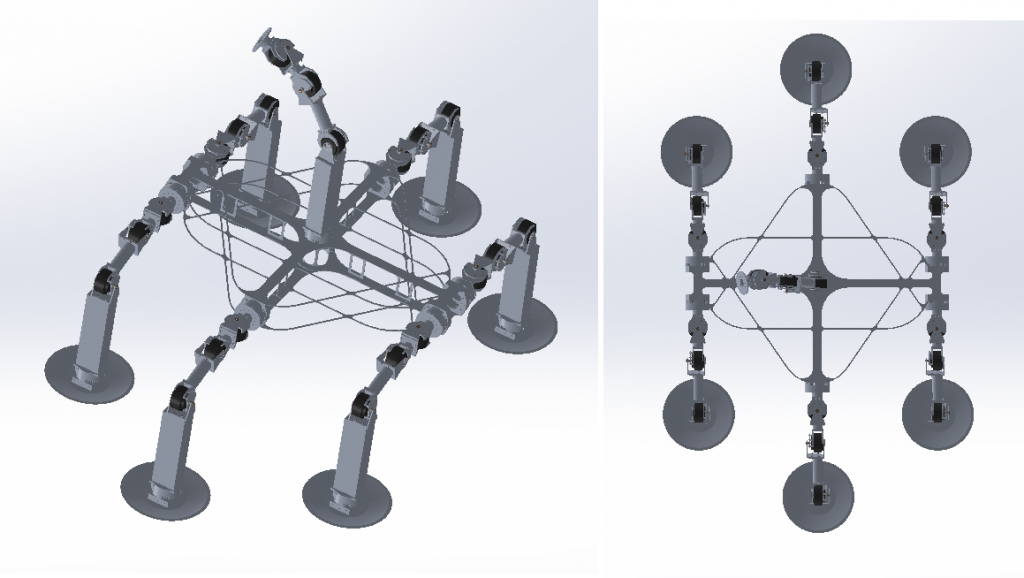
The essential components of the WORMS system are the appendage or worm, which can be connected to a body or chassis via a “universal interface block” that twists and locks the two pieces together. Appendages and bodies may also snap into a “shoe,” which the researchers created in the shape of a wok, and a LiDAR system that can map the area to help a robot navigate.
This groundbreaking technology has been funded by the National Science Foundation, MIT, the Massachusetts Space Grant, NASA, and the Fannie and John Hertz Foundation.
It is a promising advancement that could make lunar exploration easier and more successful while also serving as an example for future robotic designs.

, this universal robotic parts kit consists of worm-inspired robotic limbs that can be snapped onto a base and configured to build different types of robots. […]&media=https://wonderfulengineering.com/wp-content/uploads/2023/03/Picture4-6.png){kind=link}