
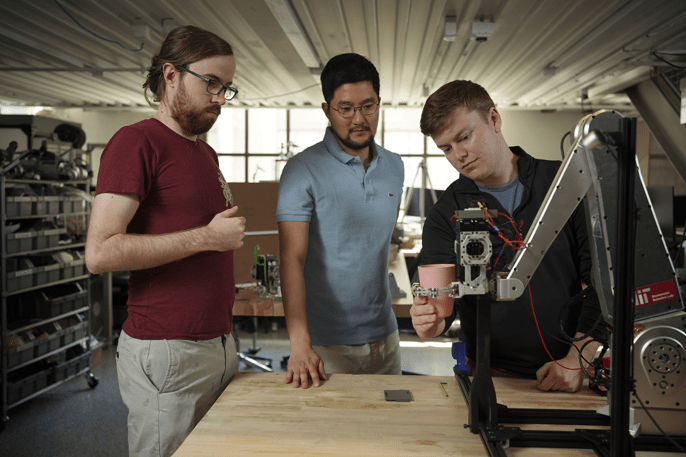
MIT engineers have developed a robotic gripper that can adapt reflexively to adjust its grasp on objects in constantly changing environments, such as picking up toys in a toybox or a book from a library shelf.
Unlike current robotic systems, which use high-level planners to process visual data and plan a series of moves to grasp an object, the new gripper is designed to make “last centimeter” adjustments without relying on a higher-level planner. This approach is similar to how humans fumble for objects in the dark without much conscious thought.
The new design, which is the first to incorporate reflexes into a robotic planning architecture, provides a general organizational structure for embedding reflexes into robotic systems.
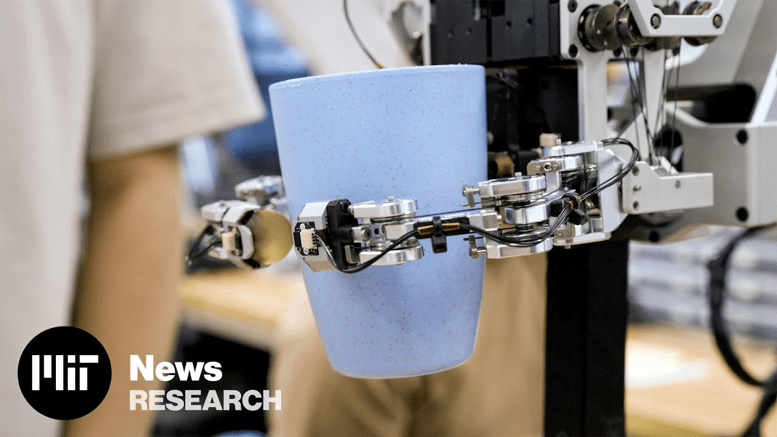
The design includes a high-speed arm and two lightweight, multijointed fingers with custom high-bandwidth sensors at the fingertips that record the force and location of any contact as well as the proximity of the finger to surrounding objects more than 200 times per second. In addition, the gripper uses a high-level planner to initially process visual data of a scene, marking an object’s current location where the gripper should pick the object up and the location where the robot should place it down.
Then, the reflexive controller takes over, using three grasp maneuvers or “reflexes” to respond to real-time measurements at the fingertips if the gripper fails to grab hold of the object. The reflexes kick in within the last centimeter of the robot approaching an object, enabling the fingers to grab, pinch, or drag an object until it has a better hold. The reflexes are organized at a lower decision-making level, so that they can respond as if by instinct, rather than having to evaluate the situation to plan an optimal fix carefully.
The team demonstrated the gripper’s reflexes by clearing a cluttered shelf, where the gripper quickly and successfully picked and placed objects more than 90 percent of the time without having to back out and start over after a failed grasp.
In a second experiment, the gripper could readjust and sense the position of an object even after it had been shifted, increasing the area of successful grasps by over 55 percent compared to a baseline grasping controller.
The engineers plan to include more complex reflexes and grasp maneuvers in the system to build a general pick-and-place robot capable of adapting to cluttered and constantly changing spaces.
“It’s like how, instead of having the CEO micromanage and plan everything in your company, you build a trust system and delegate some tasks to lower-level divisions. It may not be optimal, but it helps the company react quickly. In many cases, waiting for the optimal solution makes the situation much worse or irrecoverable,” according to the lead author, Sangbae Kim.
He also noted that “picking up a cup from a clean table — that specific problem in robotics was solved 30 years ago. But a more general approach has not been solved, like picking up toys in a toybox or even a book from a library shelf. Now with reflexes, we think we can one day pick and place in every possible way so that a robot could potentially clean up the house.”

{kind=link}