
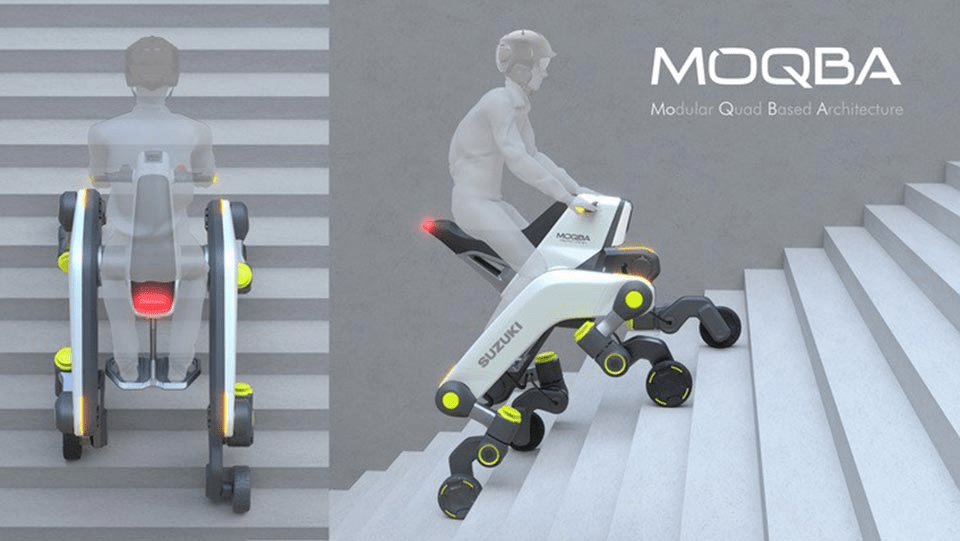
Suzuki, known for its innovative approach to mobility, has presented a peculiar creation at the Japanese Mobility Show—the MOdular Quad Based Architecture (MOQBA) machine. Unlike the traditional Suzuki motorcycles that demanded skill to ascend stairs, the MOQBA is a four-legged contraption that requires no expertise and might elicit more empathetic glances than awe.
The MOQBA boasts a unique design featuring four small electric wheels, each mounted on a robotic leg with three degrees of freedom, suspended from a double-boomerang frame. This modular chassis is intended to accommodate a variety of attachments, from a motorcycle seat to a wheelchair, stretcher, garbage bin, robotic arm, or a carry basket, offering versatility in its applications.
The primary objective behind this design is to create a self-balancing next-gen transport device capable of accessing places where traditional motorcycles cannot venture. While it may not carry a human passenger up the stairs, the MOQBA can be a boon for transporting goods, equipment, or aiding in emergency situations.

In terms of functionality, the MOQBA seems more inclined towards robotics than traditional suspension systems, resembling Hyundai’s innovative Ultimate Utility Vehicles. Its unique climbing mechanism allows it to ascend stairs one leg at a time, making it a potential choice for tasks that demand stair negotiation.
According to reported specifications, the MOQBA can achieve a top speed of 20 mph (32 km/h) and cover up to 50 miles (80 km) on a single charge. Though not designed for speed, its utility in challenging terrains and confined spaces makes it a noteworthy invention.
If the MOQBA ever advances to production, it could replace conventional mobility aids such as wheelchairs and mobility scooters. It offers the promise of improved accessibility for the elderly and disabled, providing a means to navigate subways and challenging terrains with ease.
Additionally, with a stretcher attachment, the MOQBA could play a vital role in disaster recovery efforts, ensuring safe and stable transportation of injured individuals through rugged landscapes. Its potential as a platform for autonomous or remote-controlled robots further broadens its scope, making it a versatile and impactful innovation in the realm of mobility.

 machine. Unlike the traditional Suzuki motorcycles that demanded skill to ascend stairs, the MOQBA is a four-legged contraption that requires no expertise and might elicit more empathetic glances than awe. The MOQBA […]&media=https://wonderfulengineering.com/wp-content/uploads/2023/10/1-1-1.jpg){kind=link}