
Soft-bodied robots, with their adaptability and gentle touch, promise exciting applications across fields like medicine, exploration, and disaster recovery. But despite their potential, these squishy machines have mostly been confined to lab-scale experiments. Now, a team of Scottish researchers from the University of Edinburgh is aiming to change that. Their latest creation, a quadrupedal soft robot, walks straight off the 3D printer without needing assembly, and it’s made using an affordable, open-source setup.
Earlier this year, researchers at UC San Diego unveiled a 3D-printed hexapod that took 58 hours to complete. Rather than using motors, it moved using compressed air, powering its flexible legs in a programmed sequence.
Taking that concept further, the team at the University of Edinburgh developed a similar air-powered robot but with some key innovations. For one, their printing process is much faster, requiring just nine hours instead of more than two days. More significantly, the Edinburgh robot is created using a $500 open-source 3D printer, known as the Flex Printer, in contrast to the $1,000 setup used in the San Diego experiment.
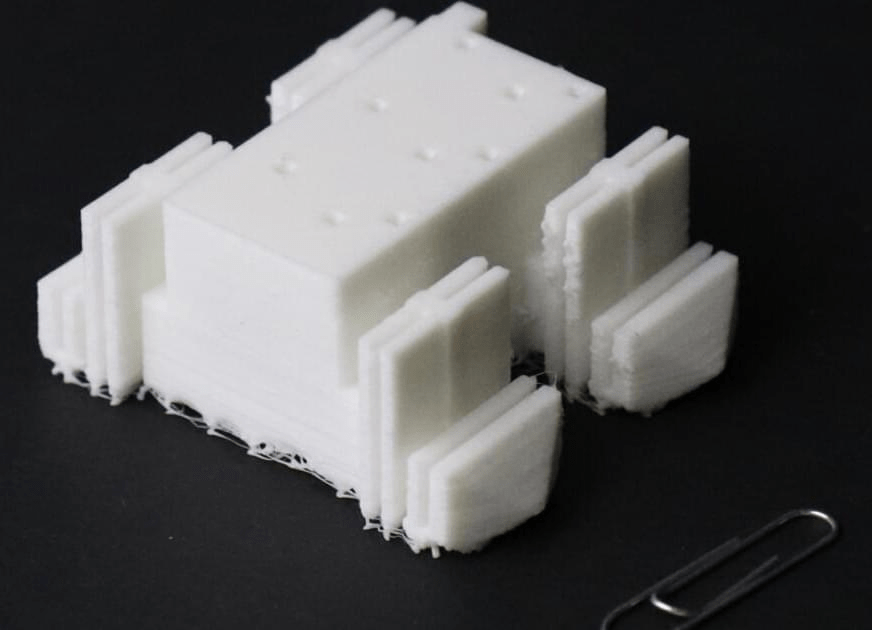
The Flex Printer itself is a DIY enthusiast’s dream made from off-the-shelf parts and fully open-source. It prints the robot using thermoplastic polyurethane (TPU), a soft and flexible material that starts as a filament and is melted, then layered to build the robot’s body.
However, TPU poses unique challenges. The molten material is so flexible that, as the scientists describe it, “trying to push on a piece of string” is a good metaphor for the printing process. It tends to buckle and droop, making precise fabrication tricky, especially for horizontal or bridge-like structures.
To tackle buckling, the team switched to a thicker 2.85 mm filament instead of the standard 1.75 mm, making the material seven times more resistant to bending. For the drooping issue, they got creative and flipped the printing process upside-down. Instead of extruding TPU onto a surface from above, the printer pushes it upward onto a print bed, using gravity to fuse each new layer onto the one above. Once the printing is done, the bed is flipped, and the robot is ready to go no assembly required.
To animate the robot, it’s connected to a pneumatic ring oscillator, which sends air pulses into internal channels. These pulses activate ligament-like actuators in the legs, enabling lifelike walking motions through sequential lifting and lateral movement.
While the current version is just a prototype, its implications are far-reaching. By removing major manufacturing barriers, the Edinburgh team hopes to open new doors for soft robotics in real-world tasks. As project lead Maks Gepner put it:
“Using our new platform, anyone can now easily print things that were previously thought to be impossible.”
Co-led with Professor Adam A. Stokes, this research has been detailed in the journal Device.
Source: The University of Edinburgh

{kind=link}