
It’s impossible to pull the picture of a massive mechanical robot that speaks in monotony and moves in sluggish, slow movements. Gentle automation enthusiasts, on the other hand, envision independent machines comprised of elastic elements that are pleasant to the touch, and more comparable to human fingers than R2-D2 or Robby the Robot. This paradigm is now being pursued by Professor Edward Adelson and his Perceptual Science Group at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL). (crej.com) Adelson and Sandra Liu, a mechanical engineering Ph.D. student at CSAIL, have created a robotic grasp that employs unique “GelSight Fin Ray” fingertips that are flexible enough just to grasp items in the same way as a human hand would.
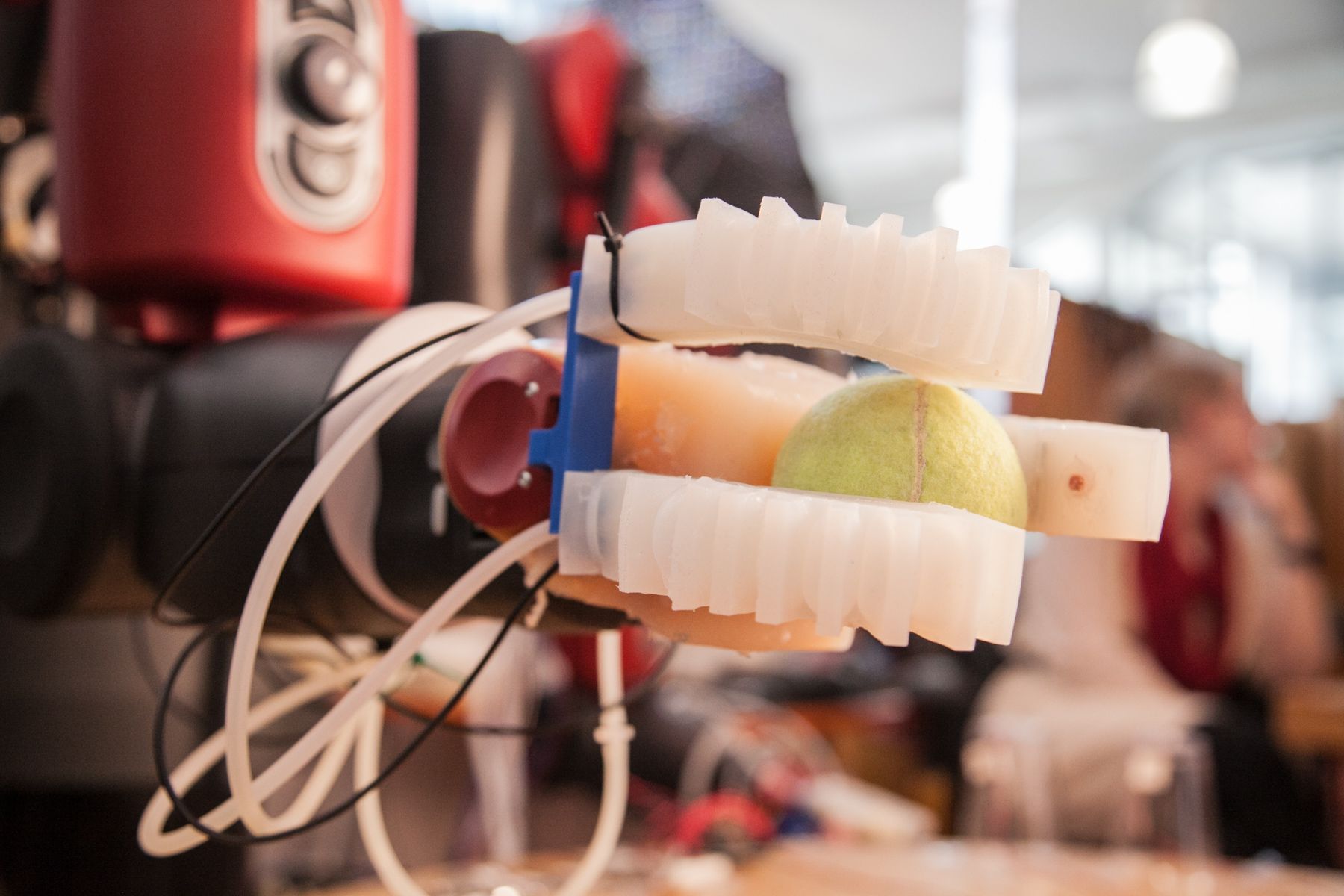
The gripper is composed of two bendable fin ray fingers that conform to the contour of anything they touch. The fingers are constructed of flexible plastic materials that were manufactured using a 3D printer, which is very typical in the industry. In contrast, most soft robotic gripper fingers feature supporting cross-struts along the length of their interiors, but Liu and Adelson hollowed down the inside to accommodate their camera and other sensing elements. The camera is mounted on a shock-absorbing base that is lit by LEDs at one end of the cardboard cut chamber. The camera is mounted before a layer of “sensing” silicone gel pads that are affixed to a thin layer of acrylic substance. The acrylic sheet is connected to the plastic finger part at the extreme edge of the interior cavity. (mgtrailer.com) When users touch anything, the finger will fluidly fold around that one, merging into its curves. The lens and associated computational techniques can examine the overall geometry of the item, its position in space, waviness, and the force exerted by each finger by calculating how the silicon and acrylic sheets contract during this encounter. In an operation in which just one of the two fingers was “sensorized,” Liu and Adelson put their gripper to the test. Their invention successfully handled a plastic strawberry, a mini-screwdriver, a Ball Mason jar, an acrylic paint bottle, and a champagne bottle.
Tactile sensing is ascribed to low-cost components such as a camera, a gel, and LEDs in their technique. Using technologies such as GelSight, Liu believes “it may be feasible to develop detectors that are both functional and inexpensive.” At the very minimum, that is one of the objectives she and the others in the laboratory are attempting to achieve. The GelSight Fin Ray offers a wide range of possible uses, but Liu and Adelson are first focusing on certain refinements. Wenzhen Yuan, Assistant Professor at Carnegie Mellon University’s Robotics Institute said; “Sensing with soft robots has proved problematic due to the difficulty of mounting detectors, which are typically stiff, on soft bodies. This study offers a simple remedy to that difficulty.”
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer/fc/73/fc737a61-0671-4691-91de-e56305a3f2f1/robotmanipulation1600x600.jpg)

{kind=link}