
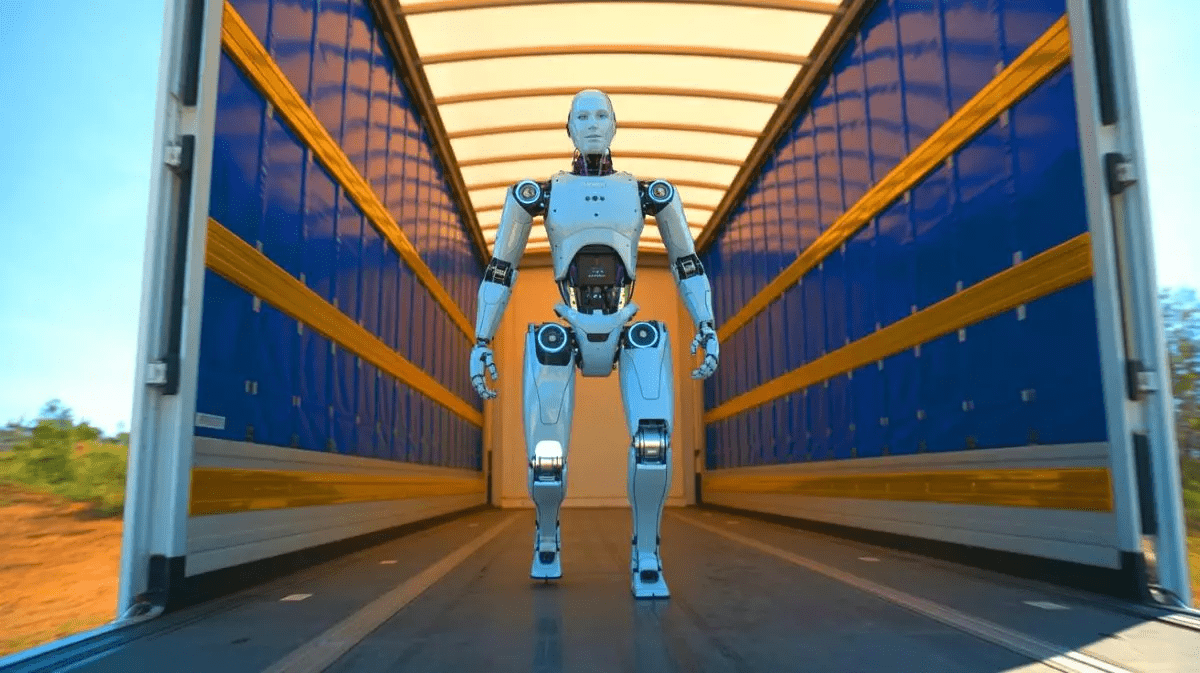
LimX Dynamics has made a bold statement with its cutting-edge Tron 1 bipedal robot, recently demonstrating a level of dynamic stability that’s capturing global attention. In a striking display of balance and agility, Tron 1 was seen walking steadily in the back of a moving truck, without any external support, while enduring sharp turns, abrupt stops, and sudden accelerations.
Unveiled last year, Tron 1 is positioned as an R&D platform for robotics engineers and researchers, designed to test the limits of humanoid mobility. Its architecture is engineered for versatility, with interchangeable foot-ends and an adaptive motion control system that adjusts software configurations on the fly to suit different terrains and use cases. This makes the robot exceptionally suited for mobility research across both structured and unstructured environments.
The demonstration aboard the moving truck emphasized what sets Tron 1 apart: its real-time sensor fusion and control algorithms that enable it to maintain upright posture even under destabilizing conditions. As noted by IEEE Spectrum, this kind of dynamic balance has direct implications for industrial settings where robots must navigate complex, unpredictable surroundings.
Beyond its physical performance, Tron 1 is built on a flexible software and hardware framework. Developers are provided with an open SDK and hardware interface, allowing experimentation with both model-based and learning-based control systems. LimX Dynamics’ proprietary joint actuators, designed specifically for legged locomotion, contribute to Tron 1’s precise motion and stability.
The robot also supports full Python integration, removing the friction typically caused by low-level programming requirements. A major feature of one-click Sim2Real deployment enables seamless transitions from simulation to physical testing, a boon for those working on reinforcement learning algorithms. Researchers and developers can easily port code between simulation environments and real-world prototypes without rebuilding their logic from scratch.
The Tron 1 ecosystem includes compatibility with popular simulators like NVIDIA Isaac, Mujoco, and Gazebo. A robust documentation suite, code samples, and the use of URDF (Unified Robot Description Format) help reduce the Sim2Real gap, significantly cutting down on iteration time.
Expandable by design, Tron 1 can be equipped with LiDAR, robotic arms, dual-spectrum gimbals, and cameras, making it applicable to a wide range of fields from academic research and industrial testing to autonomous navigation and AI algorithm validation. Its demonstrated ability to remain stable under rapid motion makes it especially promising for collaborative environments like warehouses, manufacturing floors, and even home settings where dynamic human interaction is constant.
Looking ahead, could machines like Tron 1 soon be performing household chores, assisting with elderly care, or navigating complex disaster zones? And as humanoid robots become more lifelike and capable, how will this shape public acceptance and integration?

{kind=link}