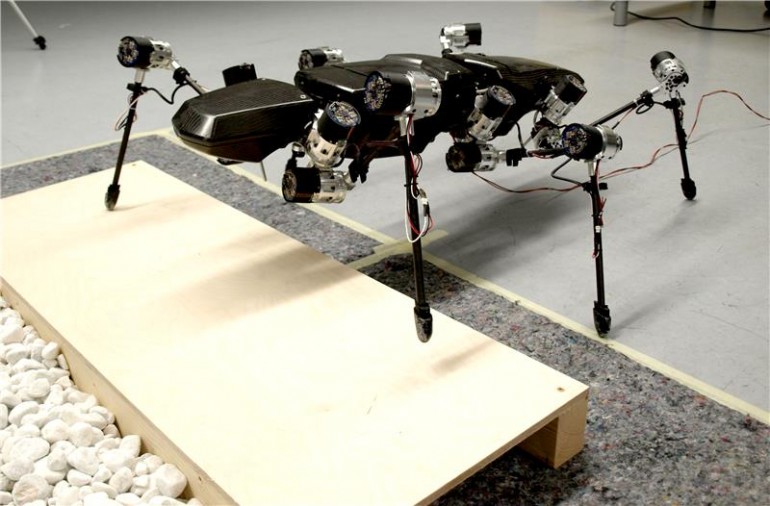
Hector is a stick inspired robot that was created at Bielefeld University, Germany in 2011 by a team of researchers. They are now working on installing walking capabilities into this robot. Hector is the abbreviation of Hexapod Cognitive Autonomously Operating Robot and according to the team, this research will also help biologists who are interested in movement of animals.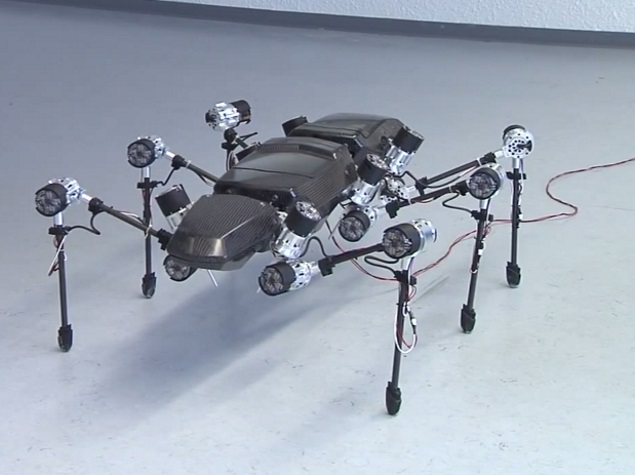
Usually 6-legged robots walk by making use of a tripod or through some other predefined pace of legs. This amazing robot, however, has no predefined gait. Which is to say it has a flexible leg control, thus enabling it to tackle rough surfaces with each leg being able to decide on its own about where and when it should move. This process is known as ‘Active Posture Adaptation’ and involves using the sensors in order to ascertain how to overcome certain hurdles.
Hector has been designed after the image of stick insect and has a highly lightweight exoskeleton created from carbon-fiber-reinforced plastic (CFRP). Apart from a number of sensors and cameras that qualify as short range ones, the robot also has 18 passive electric joints that can mimic the action of muscles.
Professor Dr. Axel Schneider stated, “The way that the elasticity in Hector’s drives acts is comparable to the way that muscles act in biological systems. However, elasticity alone is not enough for Hector to be able to walk through a natural environment containing obstacles. The challenge was to develop a control system that would coordinate the movements of its legs in difficult surroundings as well.”
Researcher Jan Paskarbeit added, “All sub-systems have to communicate with each other for the robot to walk without any difficulties. Otherwise, for example, Hector might have too many legs in the air at one time, become unstable, and fall over. Moreover, the legs have to be able to react to collisions with obstacles. We have dealt with this by implementing a reflex behavior for climbing over objects.”
Hector is therefore capable of behaving like a real insect and can decide on its own about how to crawl through its surroundings. The research team is hopeful that Hector could work as the basis for roboticists and biologists to test their hypothesis regarding locomotion in animals. A prototype has already been built to test things without damaging the robot.
Although Hector is still in development stage (in the sense that features are being added on), the team is hopeful that it will be completed by 2017 and will be far improved since it is also a part of a major project being conducted at Cluster of Excellence Cognitive Interaction Technology (CITEC).

{kind=link}
Does it even work yet? The only thing the video showed was one leg moving all by itself..
Super..