
MIT researchers have developed an innovative “soft drone” capable of flying at high speeds while grabbing objects mid-air with a unique soft grasping mechanism. Demonstrated in a video by MIT’s Spark Lab, this high-tech quadcopter prototype mimics the abilities of birds, swiftly snatching a bottle using its flexible, claw-like grippers.
This drone represents the first example of a soft aerial manipulator equipped with a fully onboard perception system. It can robustly localize and grasp various objects that differ visually and morphologically. The key inspiration comes from birds’ natural ability to carry prey during flight, but drones require much more precision and control, particularly when clutching items at high speeds.
Traditional drones rely on rigid manipulators that demand precise positioning and suffer from strong reaction forces, limiting their performance at high velocities. Past attempts to master high-speed aerial grasping have struggled to generalize across diverse environments or varied grasp targets.
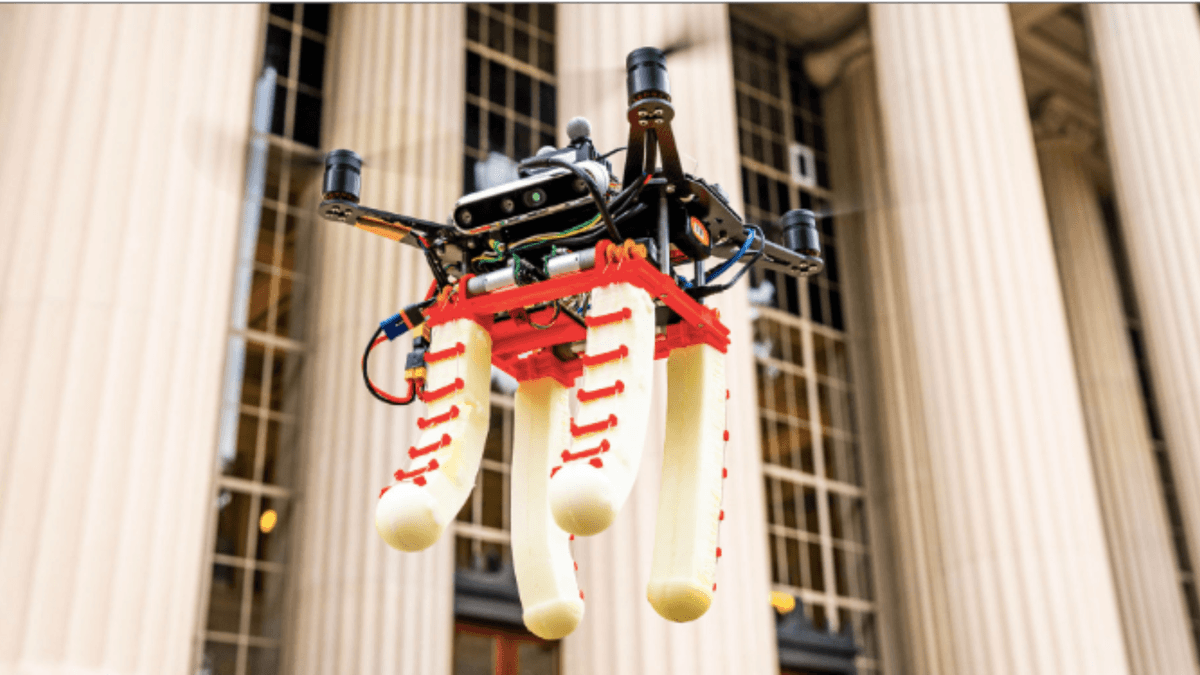
This soft drone, however, overcomes those limitations. Its soft gripper, equipped with flexible tendons, allows it to close swiftly and gently around objects, adapting to their shapes and reducing the risk of damage. The soft tendons also absorb unexpected forces, resulting in more stable grasps.
The drone’s perception system combines cutting-edge technologies, including a neural network-based semantic keypoint detector for gripping objects, a 3D object pose estimator, and a fixed-lag smoother. This allows it to accurately identify and capture objects of different sizes and shapes in complex environments.
Capable of speeds up to 2.0 meters per second, it performs the fastest vision-based grasping seen to date. Impressively, it can even catch moving objects at speeds of 0.3 meters per second, paving the way for dynamic missions like package delivery, search and rescue, and hazardous material handling.
This breakthrough technology could revolutionize industries ranging from logistics to fieldwork, unlocking new possibilities for aerial manipulation in both indoor and outdoor settings.

{kind=link}