
In a groundbreaking achievement, a team of researchers and physicians, led by Professor Ron Alterovitz from the University of North Carolina at Chapel Hill, has unveiled a revolutionary robotic medical needle capable of autonomously navigating living tissue to reach its target while skillfully avoiding anatomical obstacles. This innovative technology promises to transform medical procedures, making them safer, more accurate, and less invasive.
As self-driving cars roam the streets, medical robots are on the brink of navigating the human body with similar autonomy, skillfully steering around anatomical complexities to reach vital medical targets. Professor Ron Alterovitz, the lead researcher, points out that “By leveraging the power of robotics and AI, we developed a robot capable of autonomously steering needles to targets in living tissue with unprecedented accuracy and safety.”
The need for precise navigation within the human body is paramount. Inaccurate instrument placement during medical procedures can lead to dire consequences. For instance, failing to precisely reach a suspicious nodule in the lung for a biopsy can result in an incorrect diagnosis and untreated cancer. An autonomous medical robotic needle has the potential to enhance various procedures, including biopsies, directed drug delivery, and localized radiation cancer treatment, all of which rely on minimally invasive approaches to reduce patient discomfort and recovery time.
The team’s groundbreaking research was particularly challenging as they demonstrated the technology in one of the body’s most intricate organs: the lung. Lung cancer is a leading cause of cancer-related deaths, and tumors can be minuscule and deeply hidden within lung tissue. Moreover, the lung’s constant expansion and contraction make targeting akin to “shooting at a moving target,” as described by Dr. Akulian, one of the co-authors of the study.

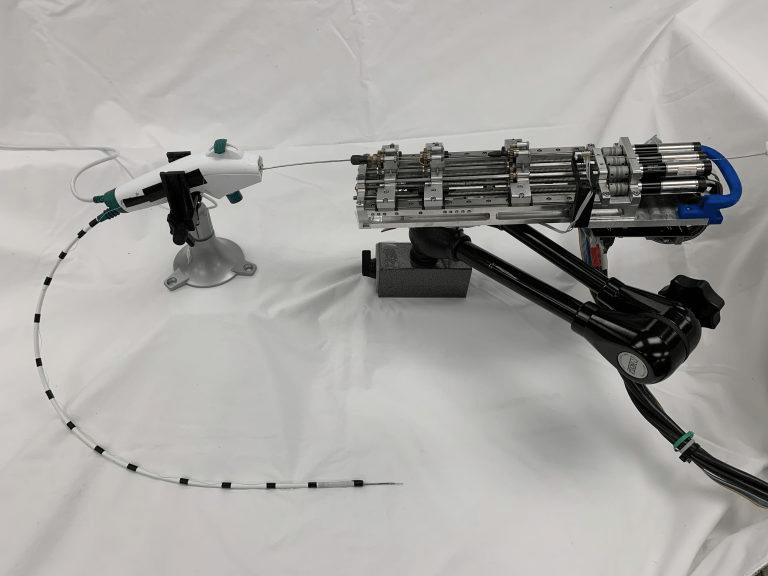
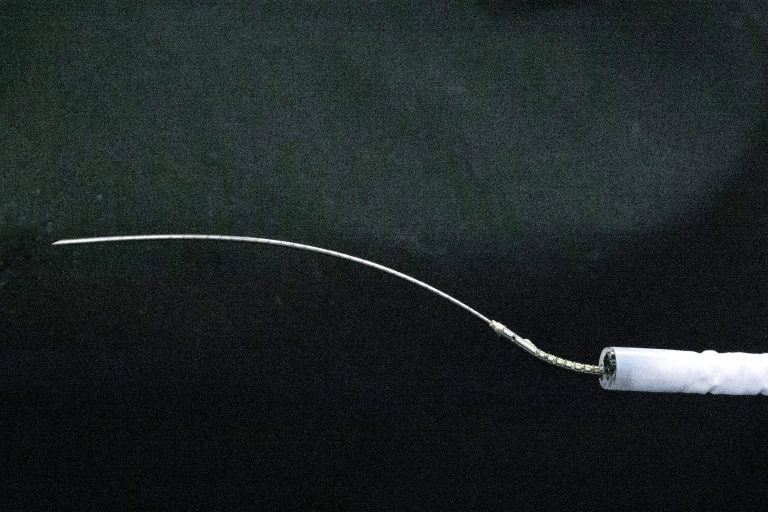
The autonomous robotic needle is a multi-component marvel. It features mechanical control for thrust, a needle design that allows for precise steering along curved paths, and is constructed from a nickel-titanium alloy with laser etching for enhanced flexibility. This design enables the needle to glide smoothly through tissue and circumvent obstacles with ease. The system can be further augmented with attachments such as catheters for a variety of medical procedures.
For the needle to navigate through living tissue, it must clearly understand its path. To achieve this, the research team employed CT scans to create three-dimensional models of the lung, including airways, blood vessels, and the target. An AI-driven software guides the needle from “Point A” to “Point B,” skillfully avoiding critical structures along the way.
Professor Alterovitz emphasizes that this “autonomous steerable needle” is compact but packed with real-time navigation technologies, akin to a self-driving car, but adapted to travel through lung tissue and avoid significant obstacles such as blood vessels.
The researchers have ambitious plans for the future. They intend to refine the system, ensuring its performance in challenging cases and exploring new applications. Dr. Akulian envisions a future where such technology can push the boundaries of medical procedures, while Professor Alterovitz is committed to “creating new autonomous medical robots that combine the strengths of robotics and AI to improve medical outcomes for patients facing a variety of health challenges, with guarantees on patient safety.”
All in all, this milestone achievement represents a significant step towards safer, more accurate, and less invasive medical procedures, where autonomous robotic needles may become a standard tool for healthcare professionals.

{kind=link}