
A team of engineers from the University of Toronto Mississauga, directed by Jessica Burgner-Kahrs, who is the director of the Continuum Robotics Lab at the same university, is on its way to achieving a major breakthrough in the field of medicine and surgery through cutting-edge technology. The team is currently on a mission to develop snake-like robots that will possess the capability to reach inaccessible parts of the human body during any major surgery or operation. To date, doctors often find it difficult to operate in sensitive areas inside the body due to the complexity of finding the affected locations.
Now, with this incredible robot, doctors would easily operate as the team describes it as “a slender, flexible, and extensible robot.” This is definitely going to be an unusual marvel in the field of robotics and has also emerged to become a scientific mainstream. In a press release about this cutting-edge technology, the researchers said, “Consider a neurosurgeon who needs to remove a brain tumor. Using a traditional, rigid surgical tool, the surgeon has to reach the cancerous mass by following a straight path into the brain and risks poking through – and damaging – vital tissue. “
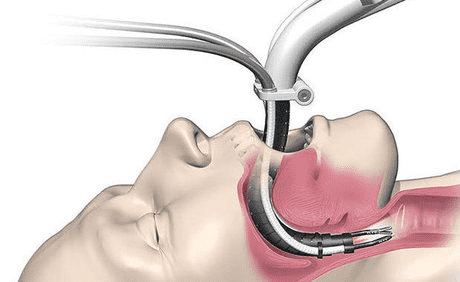
They further added, “Burgner-Kahrs envisions a day when one of her snake-like robots, guided by a surgeon, would be able to take a winding path around the vital tissue but still reach the precise surgical site. Previously inoperable brain tumors might suddenly become operable. ” Not only this, the researchers are even planning to start working on semi-autonomous models which would have the capability to automatically take the responsibility of the task and carry out the operations in an effective way.
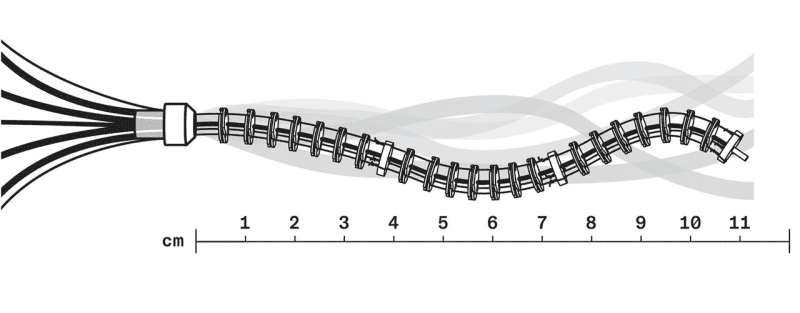
It should be noted that the upcoming new snake robot can easily pass through the complex areas within the body with the help of sensors that are integrated into it for the purpose of guiding the robot to avoid any obstacles that come in its way. However, for the time being, the doctors have to first guide the robot by putting it in the right direction so that it can travel along the body efficiently and reach its targeted location. On the other hand, Burgner-Kahrs aims to address the following questions through her research work on snake robots:
- How can we control continuum robots, so they move even more precisely through constrained and tortuous environments?
- How can we design a more intuitive interface between a human and a robot? Can we achieve a fully autonomous robot?
- How can we use multiple continuum robots in tandem to complete a task collaboratively?
Hence, the upcoming robot will be a magnificent blend of technology and will have multiple capabilities. Till then, let’s wait for its rollout.

{kind=link}