
You may have seen a robotic gripper delicately pluck an egg or palm a basketball – but, unlike human hands, one gripper is unlikely to be able to accomplish both, and a significant obstacle lies in the middle.
“You’ll see robotic hands do a powerful grasp and a precision grasp and then kind of imply that they can do everything in between,” said Wilson Ruotolo, a former graduate student in the Biomimetics and Dextrous Manipulation Lab at Stanford University. “What we wanted to address is how to create manipulators that are both dexterous and strong at the same time.”

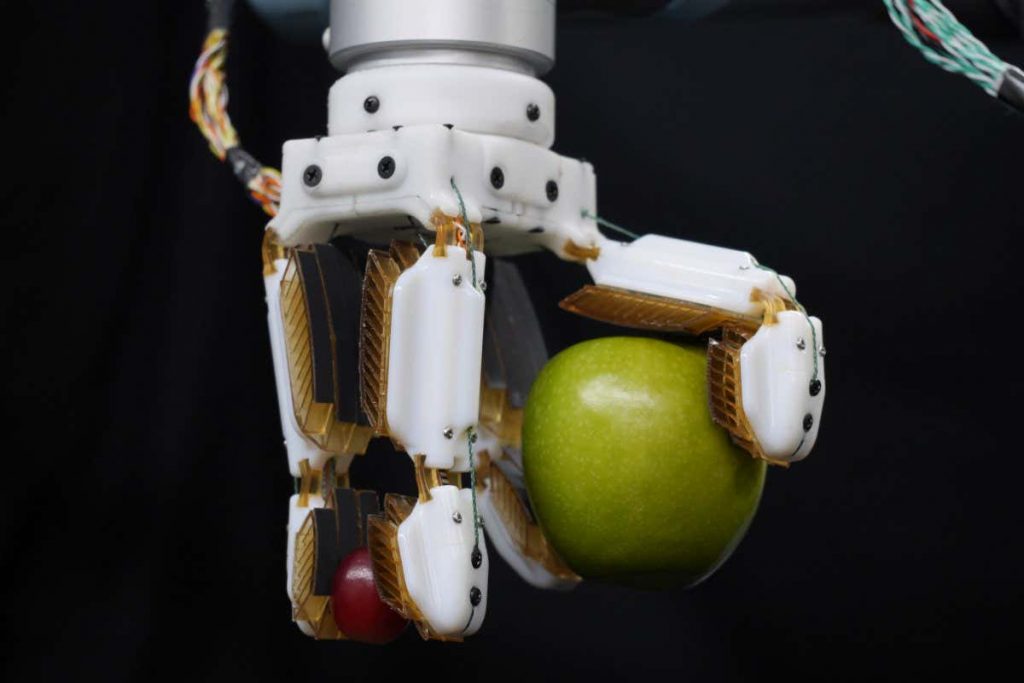
As a result, “farmHand,” a robotic hand is designed by engineers Ruotolo and Dane Brouwer at Stanford University’s Biomimetics and Dextrous Manipulation Lab. The new study is published in Science Robotics. The researchers demonstrated that farmHand could handle various things, including raw eggs, grape bunches, dishes, liquid jugs, basketballs, and even an angle grinder.
FarmHand is aided by two sources based on human biology. First, the multi-jointed fingers resemble a human hand (a four-fingered one), but they are topped with gecko-inspired adhesives. The Biomimetics and Dextrous Manipulation Lab, led by Mark Cutkosky, the Fletcher Jones Professor in Stanford’s School of Engineering and lead author of this study, has developed this gripping yet non-sticky material based on the structure of gecko toes during the previous decade.
“Anthropomorphic robotic manipulators have high grasp mobility and task flexibility but struggle to match the practical strength of parallel jaw grippers. Gecko-inspired adhesives are a promising technology to span that performance gap. Still, three key principles must be maintained for their efficient usage: high contact area, shear load sharing, and evenly distributed normal stress,” authors wrote in their study.
“This work presents an anthropomorphic end effector that combines those adhesive principles with the mobility and stiffness of a multiphalange, multi-finger design.”
It was challenging to use the gecko-adhesive on a multi-fingered, anthropomorphic gripper, so the tendons guiding farmHand’s fingers and the design of the finger pads beneath the adhesive needed extra consideration.
The new hand of Mark Cutkosky has one striking characteristic: sticky fingers. However, sticky in this context relates to a substance resembling gecko fingers by connecting tiny molecules. This one-of-a-kind synthetic gecko adhesive does not stick to all surfaces. It will only work if you pull it in a specified direction. This means that it is excellent for climbing, which Cutkosky’s lab initially used it for.

Possible enhancements to farmHand could include feedback elements that help users learn how the hand is grasping and how it could grip better while in use. The researchers are also thinking about commercial applications for their findings.

{kind=link}