
Waterway rich cities will soon see a reduction in their traffic by the introduction of autonomous multi-purpose boats. A team of researchers from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) and the Senseable City Lab have designed a fleet of low-cost 3D printed self-driving boats. These boats can be used to ferry people and goods, carry out services at night and assemble themselves into various structures.

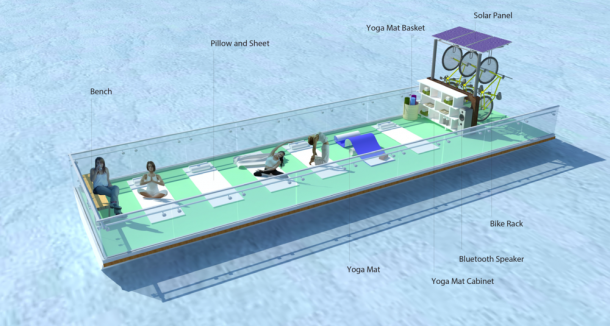
Daniela Rus, CSAIL Director said, “Imagine shifting some of the infrastructure services that usually take place during the day on the road — deliveries, garbage management, waste management — to the middle of the night, on the water, using a fleet of autonomous boats.” These 4 by 2-meter boats will be equipped with hardware enabling themselves into a variety of structures in few hours, like floating bridges or entertainment platforms. The boats will also have the potential to monitor the waters they navigate through environmental detectors.
The boats were created on a 16 piece rectangular hull which is 3D-printed in about 60 hours and sealed with fibreglass. The hull is equipped with features like power supply, Wi-Fi antenna, indoor ultrasound beacon system, outdoor real-time kinematic GPS modules and an inertial measurement unit (IMU) module. The rectangular shape determines that the boat can also move sideways and can attach to other boats as well. The boat is also able to track its position accurately through a nonlinear model predictive control (NMPC) algorithm very efficiently which takes less than 1 millisecond to function.
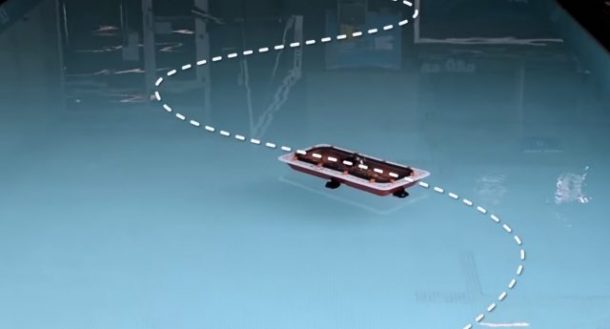
The team tested the control algorithm’s using a smaller prototype of the boat in a swimming pool and in the Charles River. After 10 test runs, the researchers found less tracking errors than in traditional control algorithm due to the algorithm being implemented in a controller computer which gives thurst every 0.2 seconds. Wei Wang, a joint postdoc in CSAIL and Senseable City Lab said, “The controller considers the boat dynamics, the current state of the boat, thrust constraints, and a reference position for the coming several seconds, to optimize how the boat drives on the path. We can then find optimal force for the thrusters that can take the boat back to the path and minimize errors.”

The researchers are also working on adaptive controllers which are suitable for conditions for the transportation of people and cargo as well for wave disturbances and stronger currents. Wang said, “We actually found that the Charles River has much more current than in the canals in Amsterdam. But there will be a lot of boats moving around, and big boats will bring big currents, so we still have to consider this.”

 and the Senseable City Lab have designed a fleet of low-cost 3D printed self-driving boats. These boats can be used to ferry people and goods, […]&media=https://wonderfulengineering.com/wp-content/uploads/2018/05/boats1.jpg){kind=link}