The engineers at the Stanford University have developed a robotic system to recover sunken treasures from the ocean depth.
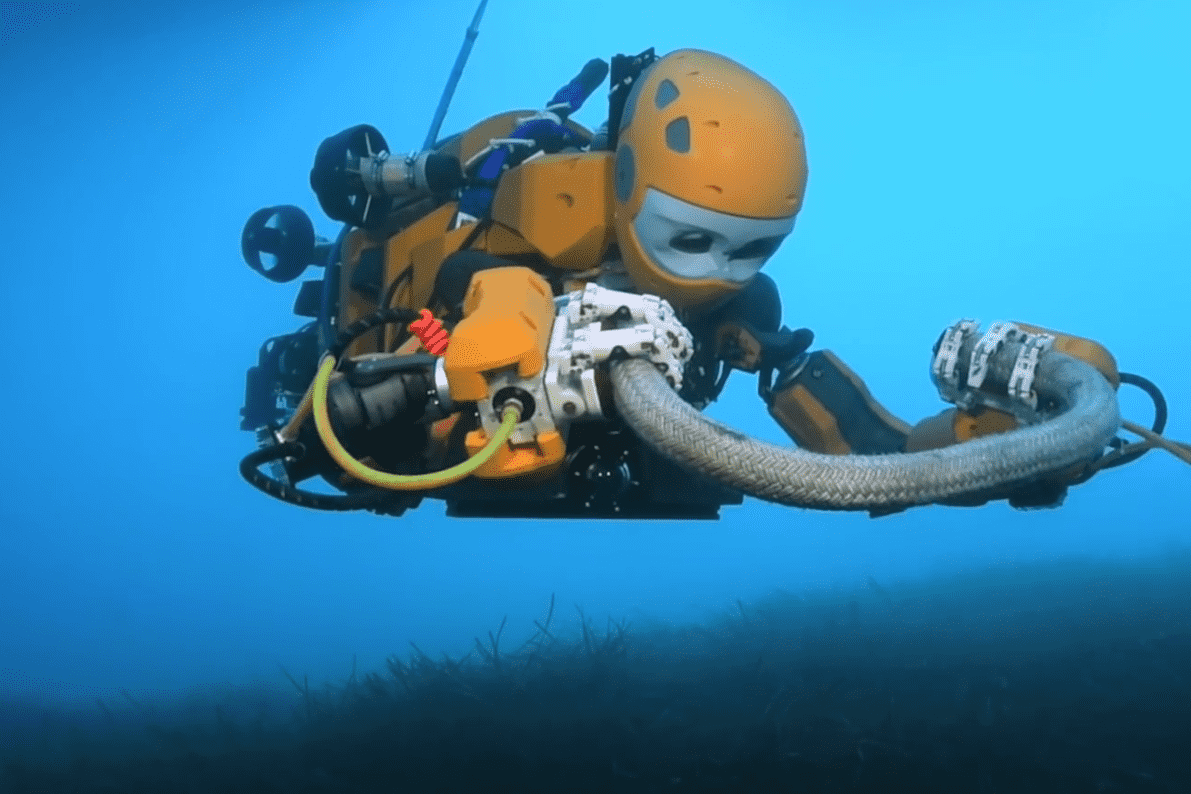
The retrieval of the precious artifacts, buried deep in the seabed is a tough task. Named OceanOne, the robotic treasure-seeker is a humanoid that has a remarkable capability to survive underwater.

The research team demonstrated the abilities of OceanOne by employing it to recover invaluable relics from the submerged King Louis XIV’s La Lune, which went down in 1664.
The humanoid, robotic, underwater treasure hunter is fitted with a head, two arms, and a tail housing propellers. Oussama Khatib is the team mentor of the OceanOne. The Machine Learning guru used joysticks to operate the robot during its first underwater dive to salvage the valuable objects from the galleon wrecked 350 years ago.

The robot relayed back a video using the stereoscopic cameras and enabled Khatib to feel the objects it held via the haptic response.
“The intent here is to have a diver diving virtually. It’s almost like you are there—you create a new dimension of perception.”
The enthusiastic Khatib explained the sense of feel generated by the system in this video:
OceanOne can smartly detect and avoid obstacles, sense turbulence, and identify water current to position itself using its propellers. Even then, the controller can regain the complete control over the submersible robot and thus,human-robot interaction becomes critical in such situations.

The ability of the OceanOne to survive under a great pressure enables it to dive deeper and reach the depths that have not yet been explored. The ultimate application of the system includes repair and maintenance of the undersea communication lines and oil rigs. Pretty cool, huh?

{kind=link}
wonderful.wish it was me who did it.always knew therez so much underneath!!!