
Robots need to be able to take care of themselves if they are to be used for search and rescue operations. But an important job of robots is that it should be able to adapt to several adverse conditions due to the nature of this work. For example, when they are damaged and can’t work with all of their parts, they must know how to move and work without that part. Keeping in mind, engineers have developed a robot that can analyze its mechanical injury and stabilize itself according to the situation within two minutes only.
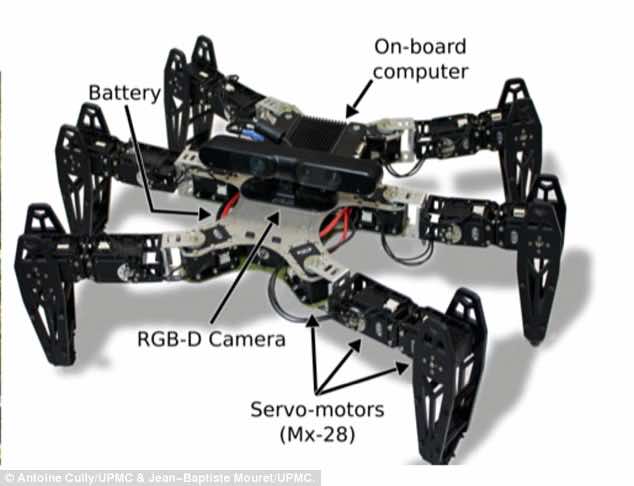
This smart move was tested on a hexapod. It is a robot with six legs, and it can carry on working even without two dysfunctional limbs due to the new trial and error algorithm being developed by the team behind this ambitious project. It allows the robot to adapt its movement by working out a new walking style that is similar to animal limping. Living things have in-built reflexes that allow us to test new walking styles like three legged dogs and humans with a sprained ankle. But in a robot, you have to enable it to understand the injury before it can take any rectifying action.
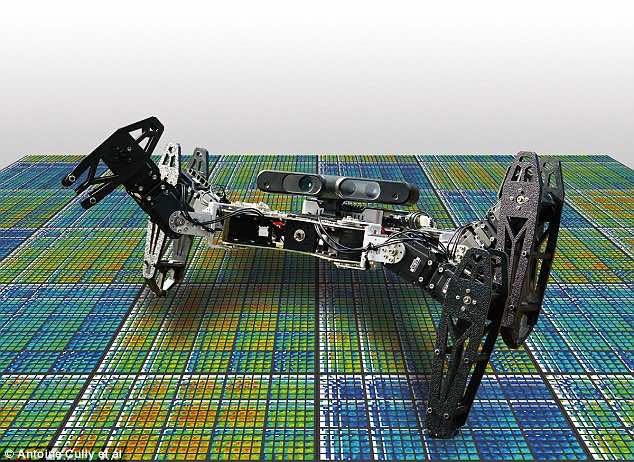
This is a simple diagram of the robot. It is used to illustrate the different setups that the robot can be in, and it then calculates the compensatory behavior necessary to move again. It decides the whole matter through a complex artificial intelligence algorithm called Intelligent Trial and Error. The system helps the robot determine which of the alternative processes are effective, and it then chooses among them. If a move doesn’t work out, the robot discards it for that injury altogether.

For example, if the hind legs of the robot aren’t working very well, it will try to shift most of the weight on front legs, thus effectively going on limp mode. Creating and harvesting the prior knowledge by the robot is essential as it won’t have to experiment again if faced with the same situation at a later stage. Let’s hope that advances in intelligent decision making and adaptation will help in the development of rescue robots.

{kind=link}