Though computer systems have made it easier for the librarians to catalog the books and place them in an ordered fashion, it is still difficult to find the book put on the wrong shelf by some casual visitor. The larger the library, the more daunting this task of finding and locating a misplaced book becomes.
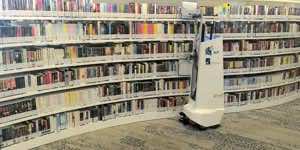
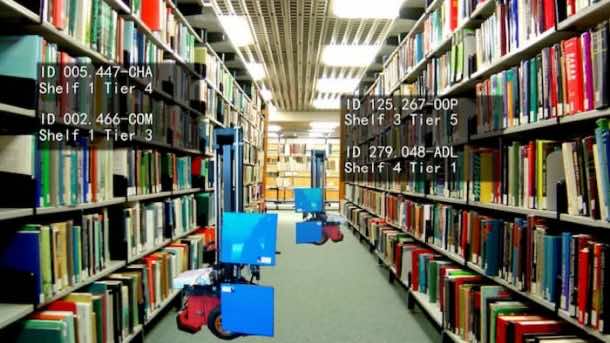
As always, technology has come to our rescue with efficient robotic librarians able to navigate their way during the dark hours of the day. These robots walk along the library shelves, scanning the book spines and identifying the missing volumes as well as those books that have been placed on a wrong shelf.
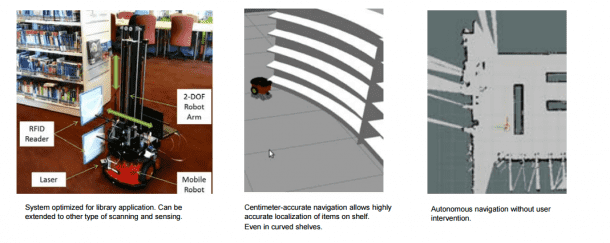
The autonomous robot does its job by scanning the RFID tags of the books. The autonomous robotic shelf-scanning (AuRoSS) system generates a report at the end of the day which can be consulted by their human counterparts in the morning to retrieve the misplaced books and return them to their original place on the shelf. Thus, the system sufficiently reduces the burden on the librarians by freeing them from the arduous task of manual scanning of each shelf.
The robot navigates its way by employing lasers and ultrasonic sensors to wheel its way around the library. One of the scientists included in the team called Renjun Li, explained the navigational plan as:
“We decided to detect the shelf surface itself, and use that as a reference to plan the paths.”
The AuRoSS system utilizes a robotic arm to adjust the RFID antenna such that it remains within the optimum tag-scanning distance. The distance must neither be too far that the signal is lost, nor too close that the scanners hit the shelf.
The system is being used in Singapore libraries and has shown an accuracy of 99 percent. Amazingly, the robotic system did not waver in its accuracy even while working on the curved shelves. The system can be customized with various sensors like cameras, Bluetooth, and Wi-Fi. The adaptability of the system makes it suitable for diversified applications like use in warehouses, retail stores, Aerospace and Automotive industries.

{kind=link}